





























































































































































































































































































































































































Sterownik silnika krokowego oparty o układ DRV8711 pozwala na sterowanie jednym bipolarnym silnikiem krokowym. Zasilany napięciem z zakresu od 8 V do 50 V, przy maksymalnym poborze prądu 6 A na cewkę. Maksymalna rozdzielczość: 1/256 kroku. Moduł pozwala na przepływ do 4 A prądu bez radiatora.
Sterownik silnika krokowego oparty o układ DRV8711 pozwala na sterowanie jednym bipolarnym silnikiem krokowym. Sterownik pozwala na sterowanie silnikiem za pomocą prostego interfejsu krokowego i kierunkowego lecz najpierw należy go skonfigurować przez interfejs SPI. Oznacza to że moduł sterujący musi być zdolny do działania w trybie master magistrali SPI (np. Arduino) i musi być podłączony do pinów SDATi, SCLK oraz SCS. Dodatkowo sterownik posiada liczne zabezpieczenia jak np. zabezpieczenie przed napięciem wstecznym, zbyt niskim napięciem. Sterownik wyposażony został w interfejs PWM pozwalający na sterowanie dwoma silnikami prądu stałego DC.
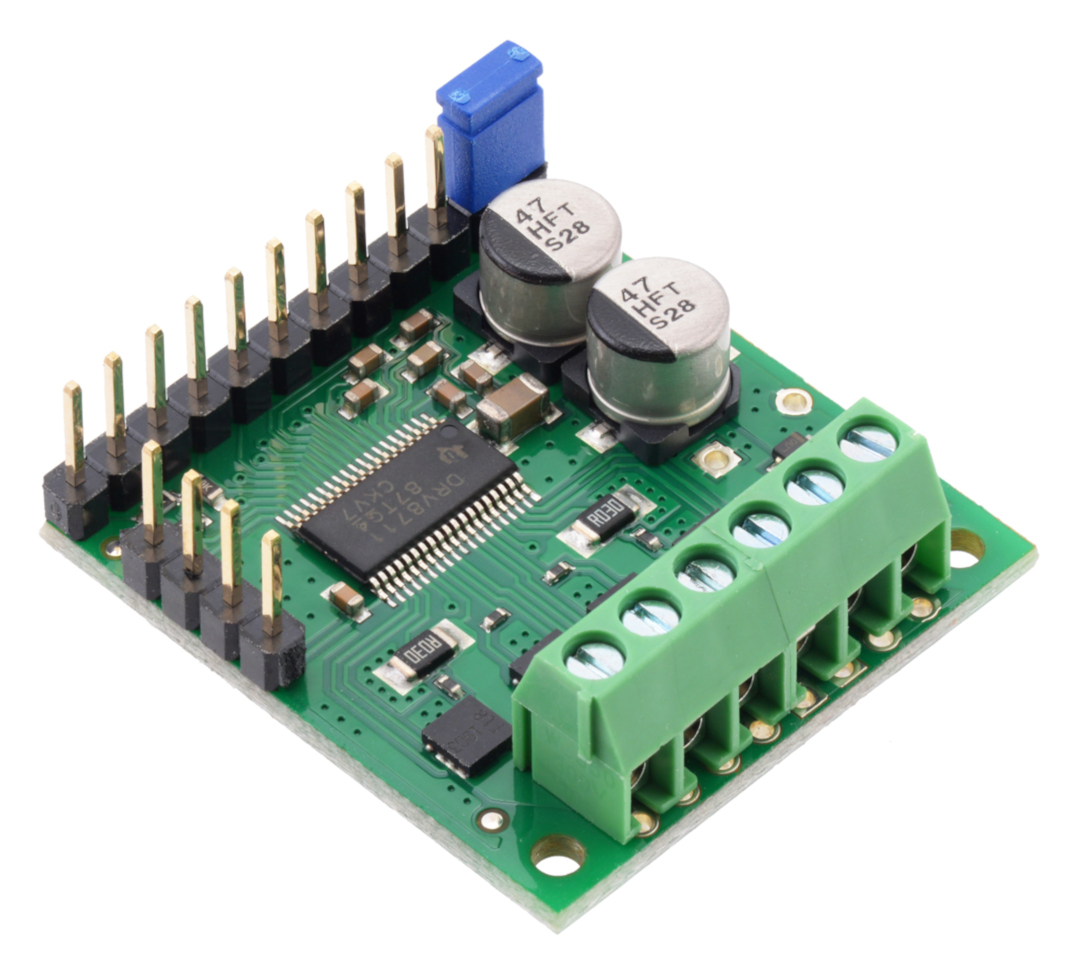
Złożony sterownik silnika krokowego - Pololu 36v4.
| Pin | Opis |
|---|---|
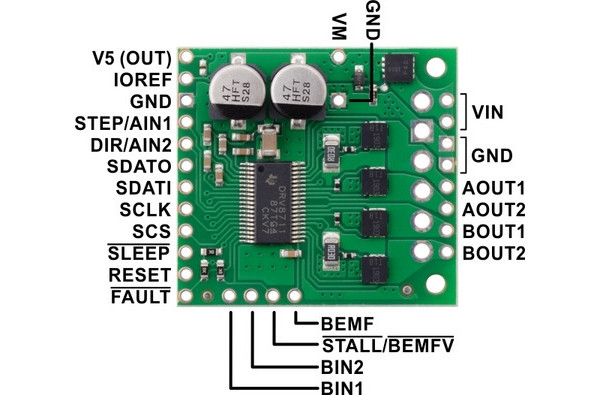
| VIN | Zasilanie silnika krokowego, od 8 do 50 V (zabezpieczenie przed odwrotną polaryzacją do 40 V) |
| VM | Pin dający dostęp do zasilania silnika krokowego. |
| GND | Masa układu. |
|
AOUT1 AOUT2 |
Wyjścia silnikowe: końce cewki fazy A. |
|
BOUT1 BOUT2 |
Wyjścia silnikowe: końce cewki fazy B |
|
V5(OUT) |
Regulowane wyjście 5 V. Zapewnia dostęp do napięcia z wewnętrznego regulatora DRV8711. Regulator może dostarczyć maksymalnie 10 mA. |
|
IOREF |
Wszystkie wyjścia sygnałowe na sterowniku (za wyjątkiem BEMF) są typu otwarty kolektor podciągnięte do pinu IOREF, dlatego powinien być zasilany napięciem równym napięciu logicznemu modułu sterującego (np. 3,3 V gdy moduł sterujący pracuje z napięciem logicznym 3,3 V). Gdy sterownik jest używany z modułem operującym napięciem 5V może być połączony z sąsiadującym pinem 5V(OUT). |
|
STEP/AIN1 |
Jeden impuls podany na pin STEP powoduje jeden krok silnika, ruch silnika może być sterowany również przez interfejs SPI więc użycie tego pinu jest opcjonalne. W trybie pracy PWM, działa on jako AIN1 zamiast STEP i bezpośrednio kontroluje stan wyjścia AOUT1. |
|
DIR/AIN2 |
Wejście określające kierunek obrotów silnika krokowego. Kierunek może być również kontrolowany za pomocą interfejsu SPI, więc użycie tego pinu jest opcjonalne. W trybie pracy PWM, działa on jako AIN1 zamiast STEP i bezpośrednio kontroluje stan wyjścia AOUT1. |
|
SDATO |
Pin określany również jako MISO, służy do wysyłania danych w interfejsie SPI. |
|
SDATI |
Pin określany również jako MOSI, służy do odbierania danych w interfejsie SPI. |
|
SCLK |
Linia zegarowa SPI. |
|
SCS |
Adresacja układu SPI. |
|
SLEEP |
Domyślnie pin jest w stanie niskim,co powoduje przejście w tryb uśpienia w którym sterownik silnika jest wyłączony, a wszystkie obwody analogowe są w trybie niskiego poboru mocy, natomiast układy cyfrowe wciąż są aktywne, co pozwala na dostęp do sterownika przez port szeregowy. W celu uruchomienia urządzenia należy podać na pin stan wysoki. |
|
RESET |
Reset układu, aktywowany stanem wysokim. Funkcja nie działa gdy urządzenie jest w trybie uśpienia. |
|
FAULT |
Pin domyślnie jest w stanie wysokim. Przechodzi w stan niski w przypadku pojawienia się błędu. |
|
BIN1 |
W trybie pracy PWM, bezpośrednio steruje stanem wyjścia BOUT1. |
|
BIN2 |
W trybie pracy PWM, bezpośrednio steruje stanem wyjścia BOUT2. |
|
STALL/BEMFV |
Wyjście typu otwarty kolektor, bezpośrednio podciągnięty do pinu IOREF. Wyjście przechodzi w stan niski gdy zostanie wykryte zostanie zatrzymanie silnika. |
|
BEMF |
Wyjście analogowe EMF. Sygnał wyjściowy na tym pinie może zostać wykorzystany w celu implementacji bardziej zaawansowanych algorytmów oraz wykrywania zatrzymania silnika. |
Pomimo że Pololu 36v4 umożliwia sterowanie silnikiem za pomocą prostego interfejsu krokowego i kierunkowego, najpierw należy go skonfigurować poprzez magistrale SPI, oznacza to że moduł sterujący musi być zdolny do działania w trybie master interfejsu SPI oraz podłączenia do pinów SDATi, SCLK oraz SCS. Piny SDATO i FAULT nie są wymagane przy korzystaniu ze sterownika.
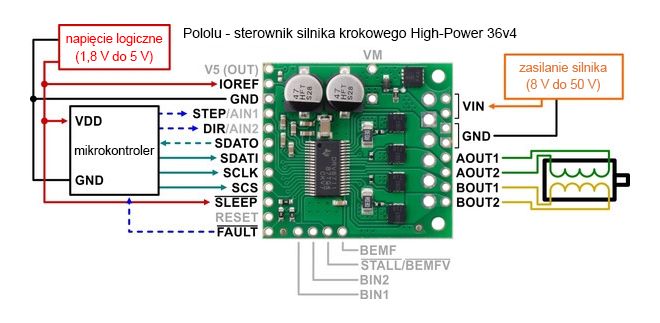
Przykładowy schemat podłączenia sterownika Pololu 36v4 z mikrokontrolerem.
Sterownik Pololu 36v4 wyposażony jest w wewnętrzny regulator 5 V, który można wykorzystać do zasilania pinu IOREF w przypadku gdy płytka jest używana z mikrokontrolerem pracującym z napięciem logicznym 5 V. W tym celu można skorzystać z dołączonej zworki lub zlutować pady na płytce.
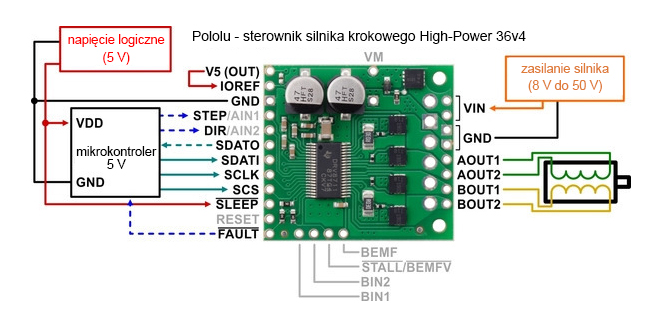
Na płytce znajdują się pady do lutowania pozwalające na połączenie wyprowadzeń 5V(OUT) oraz IOREF na stałe.
|
Uwaga! Podłączanie i odłączanie silnika, podczas gdy sterownik jest włączony może uszkodzić układ. |
Producent udostępnia gotową bibliotekę w serwisie GitHub wraz z przykładowymi szkicami dla dla płytek Arduino która zapewnia podstawowe funkcje do konfiguracji i obsługi sterownika.
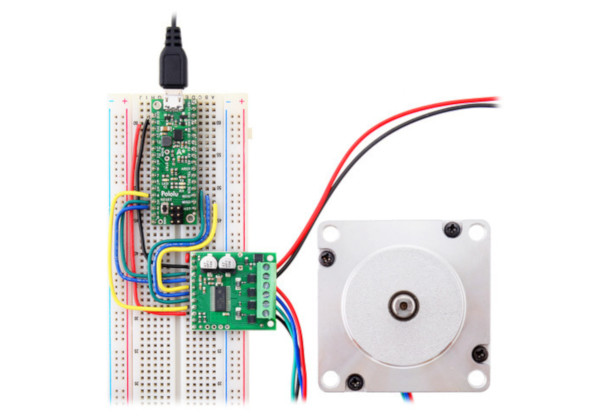
Podłączenie sterownika z modułem kompatybilnym z Arduino.
Przydatne linki |
| Napięcie zasil. od | 8.0 V |
| Napięcie zasil. do | 50.0 V |
| Wydajność prąd | 6 A |
| Ilość kanałów | 1 |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 8 cm |
| Wysokość opakowania | 0.5 cm |
| Głębokość opakowania | 7.5 cm |
| Masa opakowania | 0.01 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.




