






















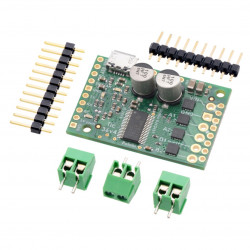


























































































































































































































































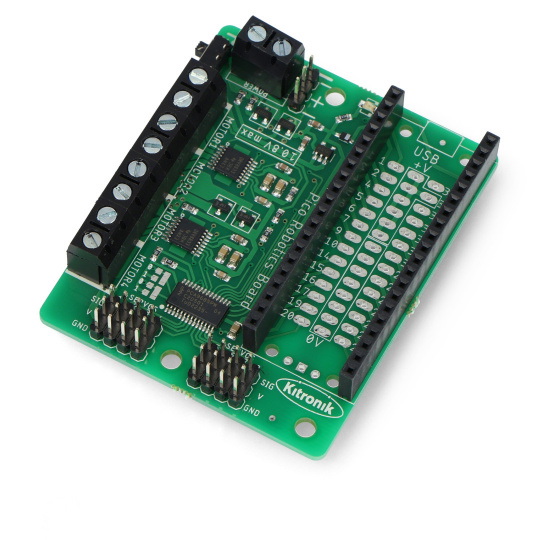
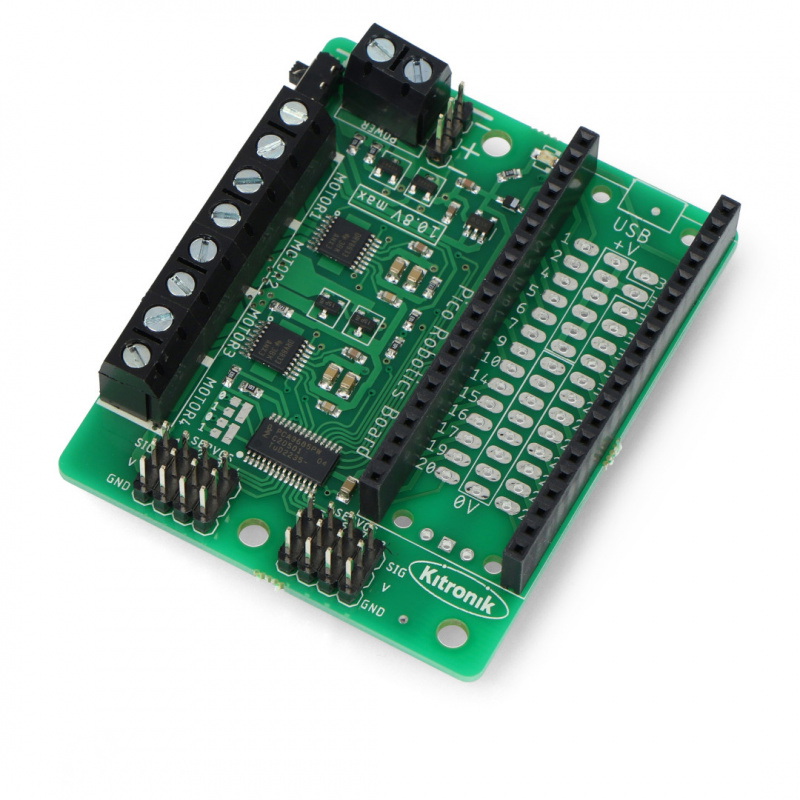




Moduł wyprodukowany przez Kitronik w postaci sterownika silników i serwomechanizmów. Kitronik Robotics Board pozwala na sterownie czterema silnikami prądu stałego DC (lub dwoma silnikami krokowymi) oraz ośmioma serwomechanizmami. Dodatkowo posiada także 27 wyprowadzeń IO, z pomocą których można rozszerzyć funkcjonalność Raspberry Pi Pico. Maksymalny pobór prądu na jeden silnik wynosi 1,5 A, a maksymalny prąd ciągły dla wszystkich podłączonych serwomechanizmów i silników nie powinien przekraczać 12 A. Napięcie zasilania elementów mieści się w zakresie od 3 V do 10,8 V. Co ważne, sterownik umożliwia jednoczesne sterowanie silnikami do przodu, do tyłu i zatrzymanie - wszystko z zachowaniem całkowitej kontroli. Z kolei podłączone serwomechanizmy mogą być kontrolowane za pomocą interfejsu I2C. Sterownik przeznaczony do pracy z Rasppberry Pi w wersji Pico.
Produkt kompatybilny z Raspberry Pi Pico!
Na stronie producenta dostępny jest przewodnik użytkownika oraz przydatne repozytoria do pobrania w serwisie GitHub. Dowiedz się z nich miedzy innymi jak zaprogramować sterownik silnika za pomocą MicroPython oraz CircuitPython.
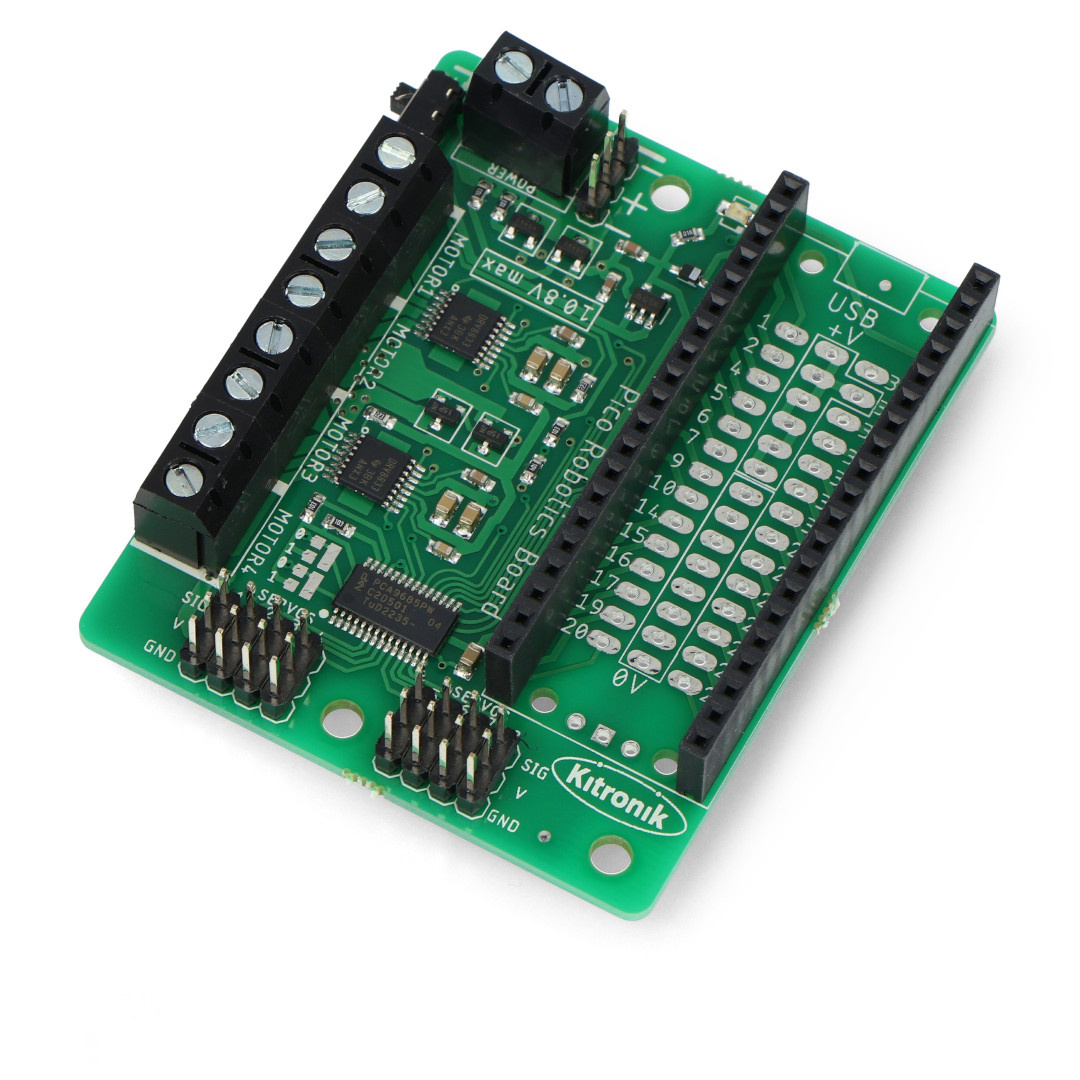
Moduł firmy Kitronik do sterownia silnikami krokowymi, silnikami prądu stałego oraz serwomechanizmami.
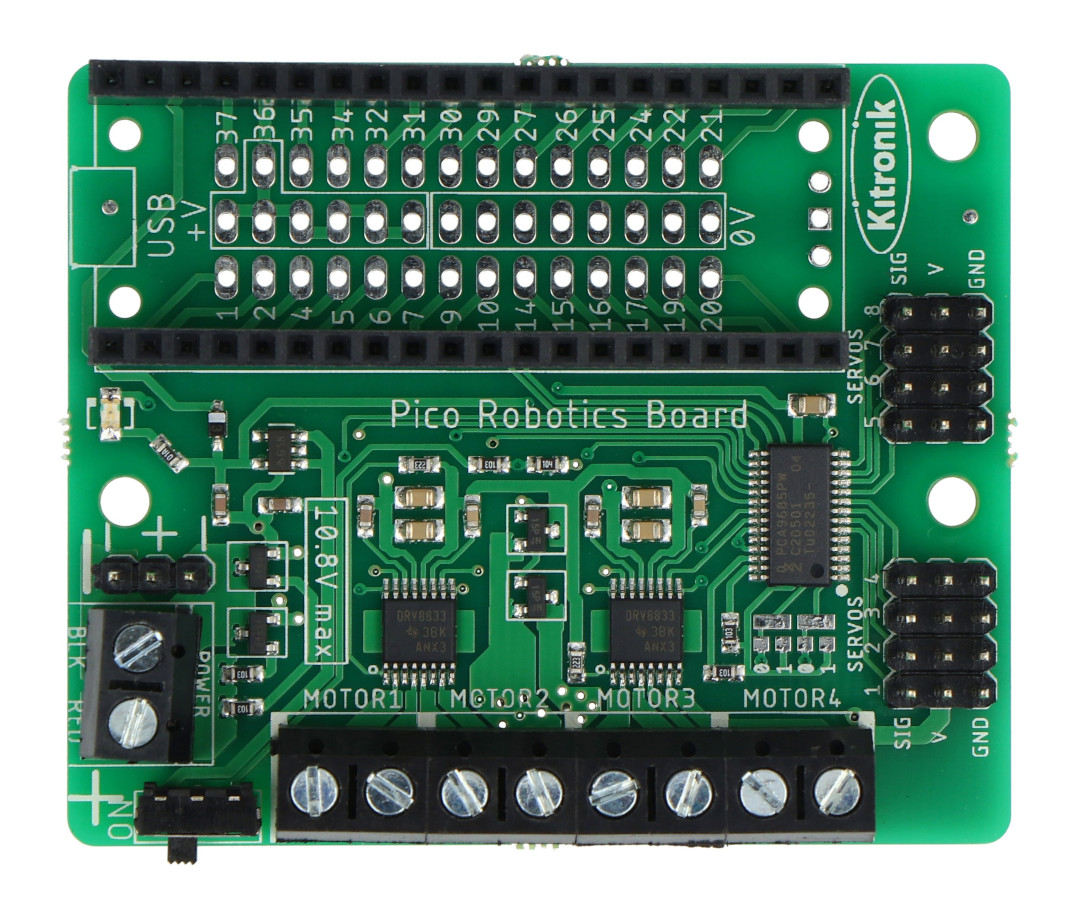
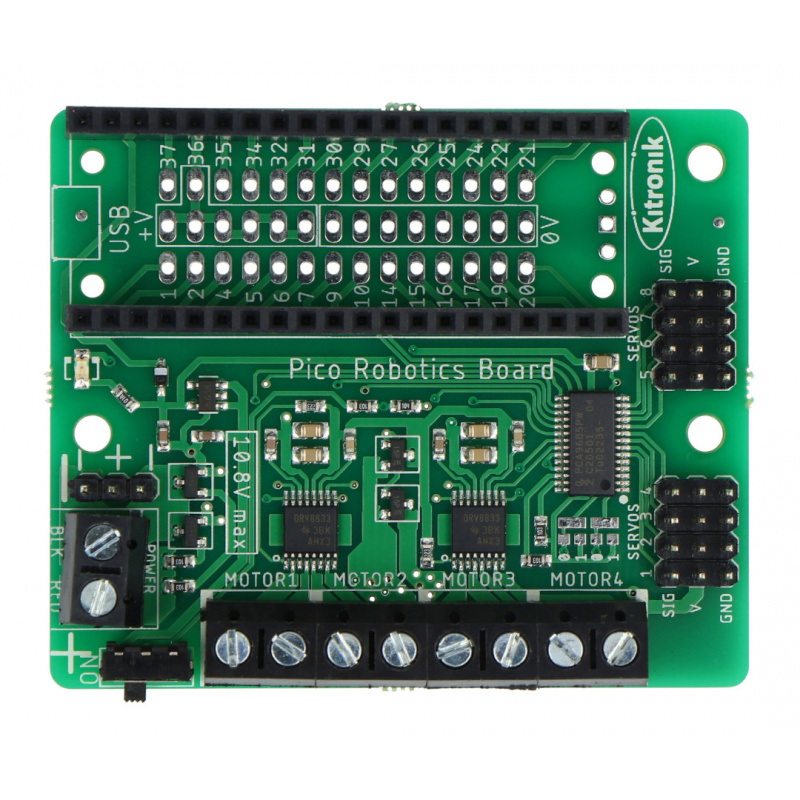
Sterownik posiada wyprowadzenia w postaci pinów GPIO oraz złącz śrubowych.
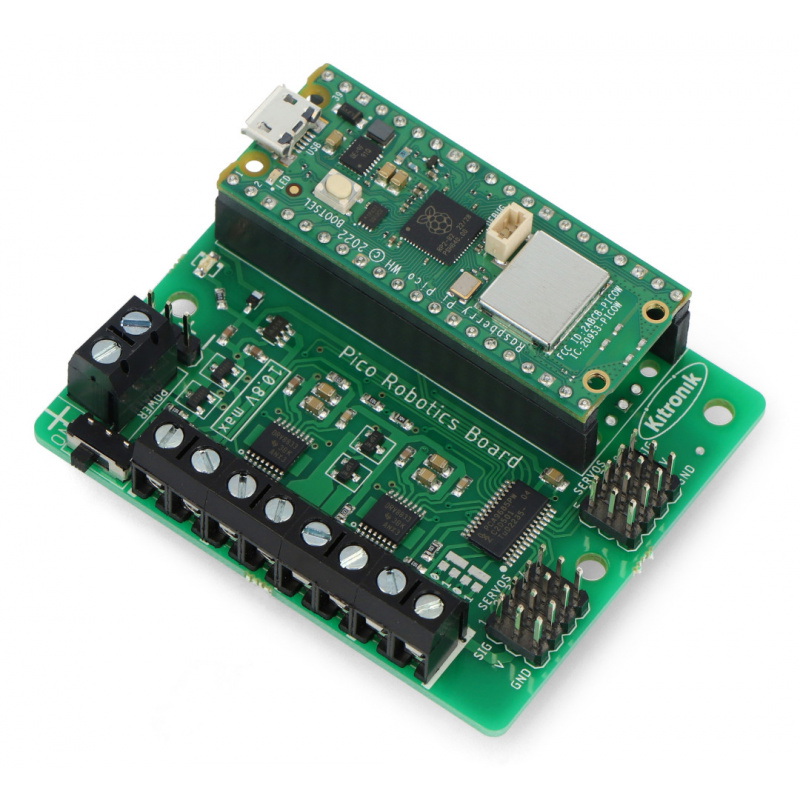
Do poprawnej pracy sterownika silników niezbędne jest użycie Raspberry Pi Pico, które nie jest częścią zestawu. Można je nabyć osobno w naszym sklepie.
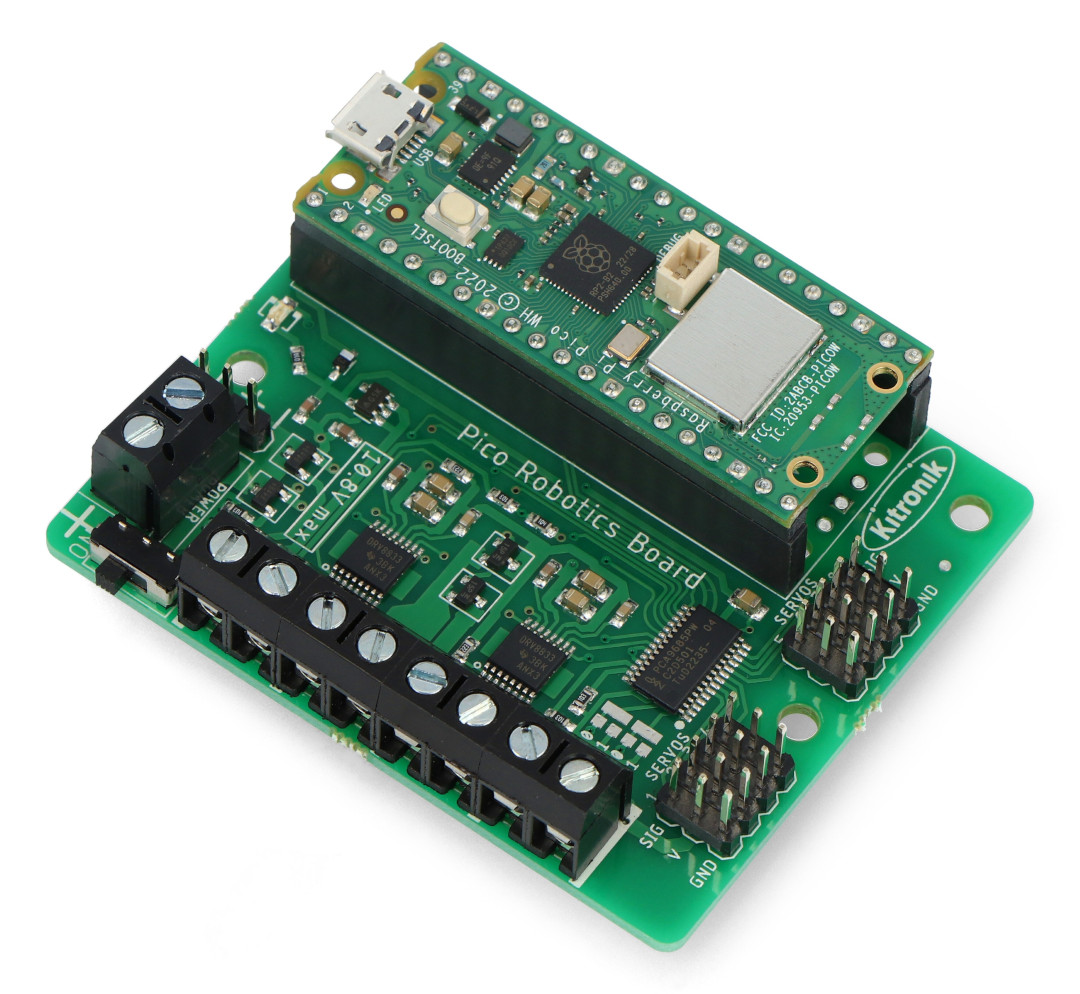
Połączenie sterownika silnika z Raspberry Pi Pico.
Kitronik Robotics Board to sterownik w formie rozszerzenia GPIO do Raspberry Pi Pico. Urządzenie umożliwia jednoczesne kontrolowanie pracy czterech silników stałoprądowych lub dwóch krokowych, a także nawet ośmiu serwomechanizmów.
Nakładka Kitronik Robotics Board jest ponadto wyposażona w fizyczny przycisk włączania i wyłączania oraz 27 pinów GPIO umożliwiających podłączenie dodatkowych elementów. Rozszerzenie komunikuje się z Raspberry Pi za pośrednictwem interfejsu I2C.
W połączeniu z Raspberry Pi Pico, Kitronik Robotics Board umożliwia zbudowanie własnego robota mobilnego lub pojazdu, a także innych poruszających się maszyn i urządzeń elektronicznych wykorzystujących płytkę RPi jako element logiczny.
Odnośniki do strony producenta, przewodnika dla użytkownika oraz przykładowych kodów MicroPython i CircuitPython znajdziesz w sekcji “Przydatne linki”, która jest umieszczona pod opisem produktu.
| Napięcie zasil. od | 3.0 V |
| Napięcie zasil. do | 10.8 V |
| Moduł - typ | Sterownik silników |
| Szerokość opakowania | 9 cm |
| Wysokość opakowania | 12.5 cm |
| Głębokość opakowania | 2 cm |
| Masa opakowania | 0.03 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Kraj pochodzenia: Wielka Brytania
Dane kontaktowe producenta: Kitronik Ltd, Unit 12a, Glaisdale Point, Glaisdale Parkway, Nottingham, UK. NG8 4GP. [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin