






























































































































































































































































BleBox openSensor - czujnik otwarcia drzwi i okien WiFi - antracytowy
Indeks: BOX-27688
- Nowość!
- Darmowa dostawa
BleBox openSensor - czujnik otwarcia drzwi i okien WiFi - antracytowy

Outlet Box dla elektronika! - wyprzedaż serii S4 - narzędzia

Pakiet filamentów ze szpulami Bambu Lab - StartPack Premium PLA - 4szt.

Pakiet - Drukarka 3D Bambu Lab P1S Combo + 6x Filament PLA


Laser Upgrade Kit do drukarki Bambu Lab z serii H2D i H2C - bez lasera


Skóra do grawerowania - cynamonowy brąz - 200x200mm - 5szt.

Radiator z wentylatorem dla Odroid XU-4 - niebieski

Zasilacz justPi microUSB 5V / 2A do Raspberry Pi Zero

Odstraszacz zwierzyny leśnej - dzików, saren, ptaków - IP44 - Viano
Qwiic Power Switch - przełącznik zasilania - SparkFun PRT-26784

Lampa sygnalizacyjna uniwersalna z anteną kogut - LED 12-230V AC/DC

Bezprzewodowa karta sieciowa WiFi 7 Tri-Band - Edmiax EW-7822UN7
Produkty, których sprzedaż została zakończona.

Sharp GP2Y0D810Z0F - cyfrowy czujnik odległości 10cm - Pololu 1135
Cyfrowy czujnik odległości Sharp GP2Y0D810Z0F wykrywający obiekty w odległości do 10 cm.
Triak BT138-600E 600V/12A - THT - 5szt.
Napięcie Vdrm: 600 V. Prąd It: 12 A. Prąd bramki Ig: maks. 25 mA. Obudowa: TO220.
Silnik wibracyjny 10 x 3,0 mm C1030B015F
Mały silnik generujący wibracje z prędkością obrotową 1000 obr/min. Pobiera około 100 mA prądu przy zasilaniu napięciem 3 V.
Akumulator Li-Pol Dualsky 300mAh 25C 1S 3.7V
Wydajny akumulator litowo-polimerowy Dualsky. Napięcie nominalne 3,7 V. Prąd rozładowania: ciągły 25 C (7,5 A), chwilowy 50 C (15 A). Wymiary 45 x 20 x 7 mm z wtyczką. Masa 8 g.
Złącze żeńskie ZIF, FFC/FPC, poziome 30 pin, raster 0,5 mm, górny kontakt
Złącze FFC/FPC 30 pin, poziome, raster 0,5 mm, górny kontakt, lutowane powierzchniowo (SMD).
Rezystor THT CF węglowy 1/4W 47kΩ - 30szt.
Zestaw 30 rezystorów o mocy 1/4 W . Elementy w obudowie przewlekanej THT.
Rezystor THT CF węglowy 1/4W 56kΩ - 30szt.
Zestaw 30 rezystorów o mocy 1/4 W. Elementy w obudowie przewlekanej THT.
Nakładka VESA do obudów TEKO do Raspberry - przezroczysta
Przezroczyta nakładka przystosowana do montażu VESA (montaż obudowy w tylnej części telewizora, monitora). Pozwala zamontować Raspberry w obudowie z serii TEKO na monitorze.
Listwa montażowa żeńska, 5-pinowa, raster 3,5mm
Listwa zaciskowa rozłączalna, żeńska, 4-pinowa. Komponent przeznaczony do montażu na płytkach drukowanych i innych systemach elektronicznych. Dzięki swojej konstrukcji...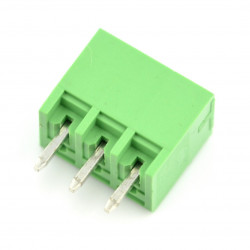
Listwa montażowa męska, 3-pinowa, raster 3,5mm, pionowa, zabudowana
Listwa zaciskowa rozłączalna, męska, 3-pinowa. Raster 3,5 mm. Wysokość 9,20 mm. Niezawodne rozwiązanie do łączenia przewodów w różnorodnych projektach elektronicznych i...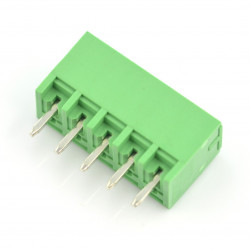
Listwa montażowa męska, 5-pinowa, raster 3,5mm, pionowa, zabudowana
Listwa zaciskowa rozłączalna, męska, 5-pinowa . Raster 3,5 mm. Wysokość 9,20 mm.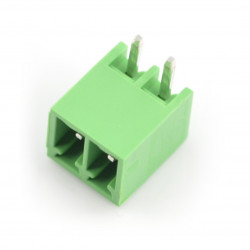
Listwa montażowa męska, 2-pinowa, raster 3,5mm, kątowa, zabudowana
Listwa zaciskowa rozłączalna, męska, kątowa, 2-pinowa . Raster 3,5 mm. Wysokość 9,20 mm.
Listwa montażowa męska, 3-pinowa, raster 3,5mm, kątowa, zabudowana
Listwa zaciskowa rozłączalna, męska, kątowa, 3-pinowa . Raster 3,5 mm. Wysokość 9,20 mm.
Listwa montażowa żeńska, 3-pinowa, raster 5,08mm, stalowa klatka
Listwa zaciskowa rozłączalna, żeńska, 3-pinowa . Raster 5,08 mm. Wysokość 15,1 mm. Śruba na wkrętak płaski (-).
Listwa montażowa męska, 8-pinowa, raster 5,08mm, pionowa, zabudowana
Listwa zaciskowa rozłączalna, męska, 8-pinowa. Raster 5,08 mm. Wysokość 11 mm.
Listwa montażowa męska, 10-pinowa, raster 5,08mm, pionowa, zabudowana
Listwa zaciskowa rozłączalna, męska, 10-pinowa. Raster 5,08 mm. Wysokość 12 mm.
Listwa montażowa męska, 4-pinowa, raster 5,08mm, kątowa, zabudowana
Listwa zaciskowa rozłączalna, męska, kątowa, 4-pinowa. Raster 5,08 mm. Wysokość 12 mm.
Listwa montażowa męska, 8-pinowa, raster 5,08mm, kątowa, zabudowana
Listwa zaciskowa rozłączalna, męska, kątowa, 8-pinowa. Łatwa w obsłudze, bez konieczności stosowania dodatkowych narzędzi. Raster 5,08 mm. Wysokość 12 mm.
Listwa montażowa męska, 10-pinowa, raster 5,08mm, kątowa, zabudowana
Listwa zaciskowa rozłączalna, męska, kątowa, 10-pinowa. Raster 5,08 mm. Wysokość 12 mm.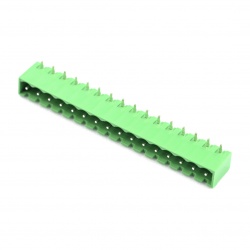
Listwa montażowa męska, 16-pinowa, raster 5,08mm, kątowa, zabudowana
Listwa zaciskowa rozłączalna, męska, kątowa, 16-pinowa. Łatwa w obsłudze, bez konieczności stosowania zaawansowanych narzędzi. Idealna do zasilaczy, urządzeń audio i wideo,...
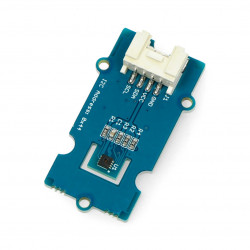
Czujnik pyłu/czystości powietrza PM2.5 - DSM501A - 5V PWM
Czujnik pyłu umożliwia monitorowanie czystości powietrza. Wyposażony w czujnik pozwalający wykryć cząstki o średnicy powyżej 1 μm , np. dym papierosowy. Układ zasilany jest...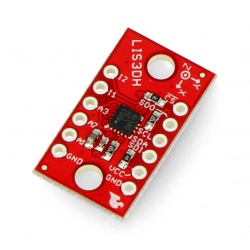
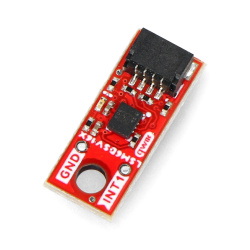
LIS3DH - 3-osiowy akcelerometr IMU 3DoF I2C/SPI - SparkFun SEN-13963
Czujnik LIS3DH to 3-osiowy cyfrowy akcelerometr. Pozwala na pomiar przyspieszeń w konfigurowalnych zakresach. Komunikuje się poprzez magistralę I2C lub SPI, zasilany jest...
Rzep z klamrą do akumulatorów Dualsky 280mm - 1szt.
Rzep stanowi estetyczne i wytrzymałe mocowanie dla akumulatorów, np pakietów li-pol. Długość wynosi 280 mm. W zestawie znajduje się 1 szt.
Kontrolka 12V AC/DC - 28mm - niebieska
Kontrolka działająca z napięciem 12 V AC/DC. Posiada średnicę 28 mm.Zobacz również