

















































































































































































































































































































































































































Co to jest silnik krokowy? Jak działa silniczek krokowy?
Budowa silnika krokowego
Silnik krokowy - Budowa i zastosowanie
Silniki krokowe są silnikami prądu stałego, które poruszają się za pomocą określonych skoków. Mają one liczne cewki zebrane w grupy nazywane "fazami". Po zasileniu każdej fazy kolejno, silnik obróci się o jeden krok.
Za pomocą komputera można ustawić pozycję sinika i/lub sterować jego prędkością. Z tego powodu, są one wybierane do wielu aplikacji nadzorujących precyzję ruchu.
Silniki krokowe mają różne rozmiary i style oraz elektryczne parametry. Poradnik ten przedstawi wszystko co musisz wiedzieć przy wybieraniu odpowiedniego dla siebie silnika.
Silnik krokowy - Schemat:
4-fazowy silnik jednobiegunowy
Animacja z Wikipedii
Gdzie można użyć silników krokowych?
- Pozycjonowanie - silniki te poruszają się za pomocą określonych, powtarzających się skoków, najlepsze więc będą w aplikacjach wymagających precyzyjnego pozycjonowania, np. drukarki 3D, CNC, platformy dla kamer oraz Plotery X-Y. Niektóre napędy dysków również używają silników krokowych do pozycjonowania głowic elektromagnetycznych.
- Regulacja prędkości - precyzyjny wzrost ruchu pozwala na doskonałą kontrolę ruchu obrotowego w procesie automatyzacji i robotyki.
- Niski moment obrotowy - standardowe silniki prądu stałego nie posiadają wysokich momentów obrotowych przy małej prędkości. Natomiast, silnik krokowy ma maksymalny moment obrotowy przy niskiej prędkości. Jest to więc dobry wybór jeśli szukasz silnika o wyżej wspomnianej prędkości i wysokiej precyzji.

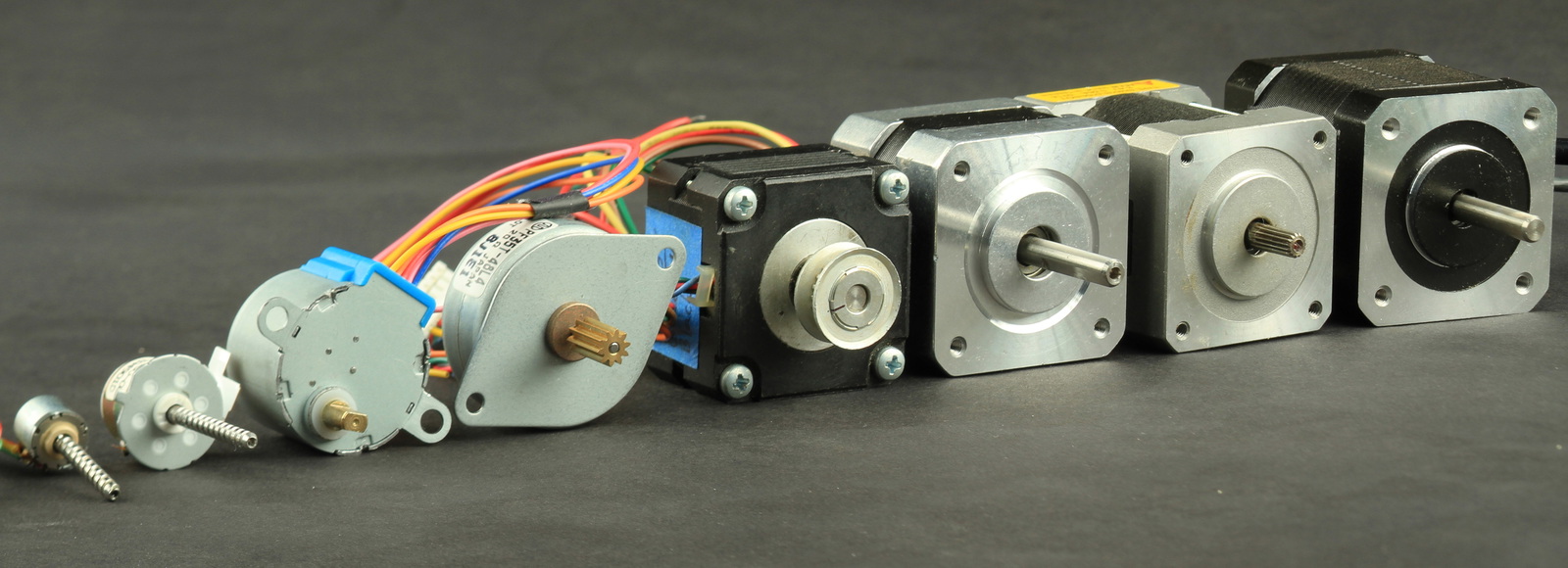
Silniki krokowe o różnej budowie
Jakie ograniczenia mają silniki krokowe?
- Niska wydajność - pobór prądu przez silnik krokowy, jest niezależny od obciążenia. Zużywają one najwięcej prądu, gdy nie pracują. Z tego powodu, mają tendencję do nagrzewania się.
- Ograniczony wysoki moment obrotowy - silniki krokowe posiadają niższy moment obrotowy, nie przy małych, ale przy dużych prędkościach. Niektóre z nich są zoptymalizowane tak, aby dysponowały wysokimi prędkościami. Aby je osiągnąć, muszą zostać sparowane z odpowiednim sterownikiem.
- Brak sprzężenia zwrotnego - w przeciwieństwie do serwomchanizmów, większość silników krokowych nie posiada integralnego sprzężenia zwrotnego przy pozycjonowaniu. Aczkolwiek, doskonała precyzja może zostać osiągnięta poprzez włączenie "otwartej pętli". Wyłączniki krańcowe lub czujniki domowe są zazwyczaj potrzebne dla bezpieczeństwa i/lub, aby ustalić pozycję odniesienia.
Rodzaje silników krokowych
Istnieje szeroki wybór silników krokowych, niektóre z nich wymagają bardzo specjalistycznych sterowników. W naszym poradniku, skupimy się tylko na tych, które mogą działać z powszechnie dostępnymi sterownikami. Są to: silnik z magnesem trwałym lub silnik hybrydowy, dwufazowy bipolarny lub czterofazowy unipolarny.
Rodzaje silników krokowych
Silnik krokowy - Rozmiar silnika
Jedną z pierwszych rzeczy jaką trzeba wziąć pod uwagę, to praca jaką silnik ma do wykonania. Można się domyślić, że większe z nich potrafią dostarczyć więcej mocy. Silniki krokowe mogą być mniejsze od orzecha, ale też są takie duże jak NEMA 57.
Większość z nich ma znamionową wartość momentu obrotowego. To na to musisz uważać, decydując o tym, czy silnik ma wystarczająco dużo mocy.
NEMA 17 jest silnikiem o typowym rozmiarze, który używany jest w drukarkach 3D i w mniejszych frezarkach CNC. Niewielkie silniki znajdują zastosowanie w wielu zrobotyzowanych i animatronicznych projektach. Większe silniki NEMA są zwykle używane w maszynach CNC i znajdują zastosowanie w przemyśle.
Liczby NEMA określają standardowe wymiary płyty czołowej w montażu silnika. Nie definiują one innych jego parametrów. Dwa różne silniki NEMA 17 mają zupełnie inne elektryczne lub mechaniczne specyfikacje. Nie są one wymienne.
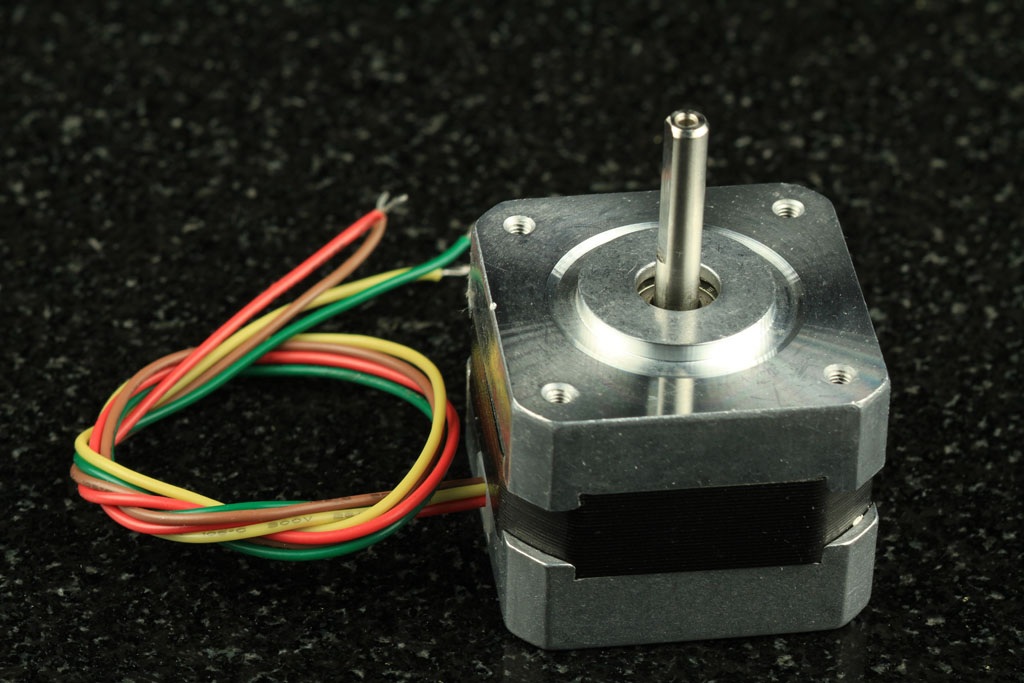
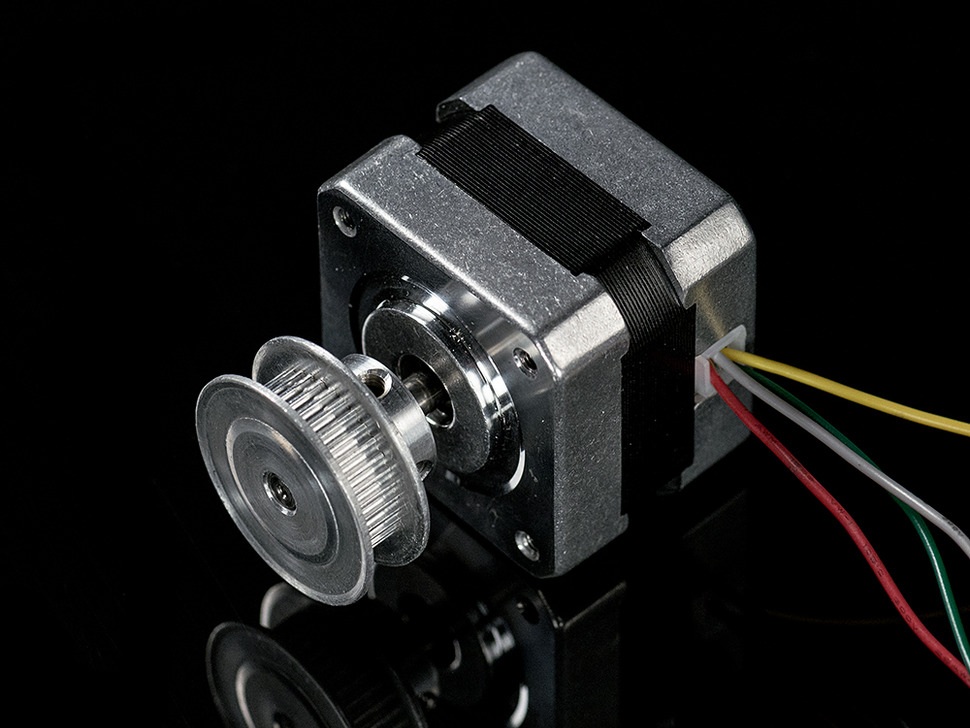
Silnik krokowy NEMA17
Licznik kroków
Następną rzeczą godną uwagi jest wymagana rozdzielczość pozycjonowania. Ilość kroków na obrót ma zakres od 4 do 400. Powszechnie dostępne liczniki kroków to 24, 48 i 200.
Rozdzielczość jest często wyrażana w stopniach na krok. Silnik 1,8° jest taki sam jak silnik 200 kroków na obrót.
Kompromisem wysokiej rozdzielczości jest prędkość i moment obrotowy. Silniki o dużej liczbie kroków działają lepiej przy niższych obrotach. Szybsza prędkość powoduje niższy moment obrotowy.
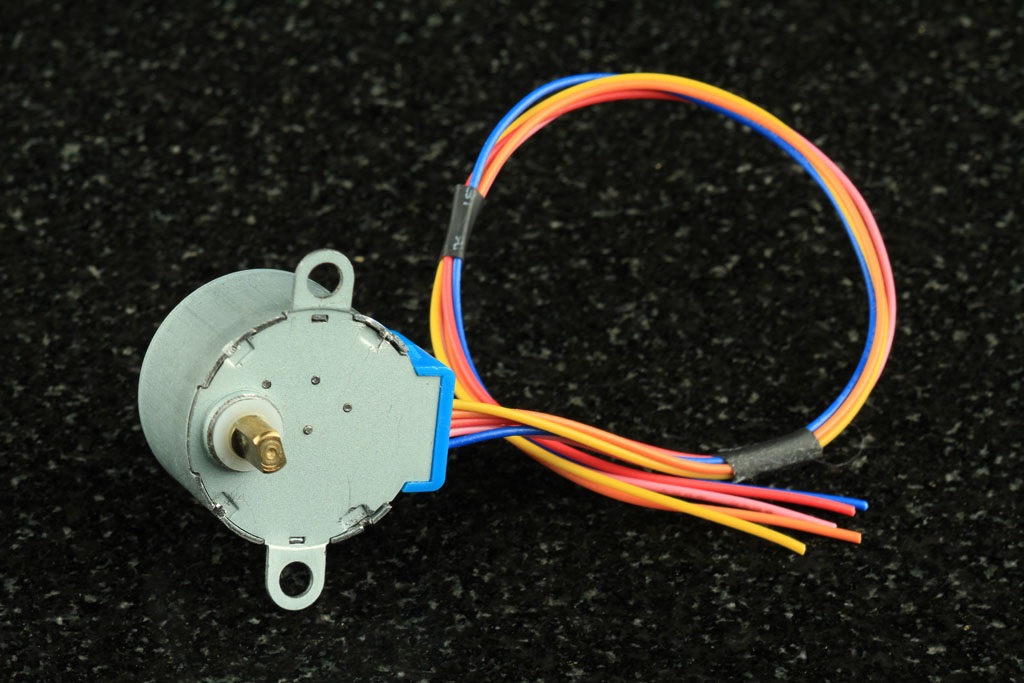
Mały silnik krokowy
Przekładnia
Kolejnym sposobem na uzyskanie wysokiej rozdzielczości pozycjonowania jest użycie przekładni. Efektem zastosowania przekładni 32:1 na wyjściu silnika obracającego się o 8-kroków na obrót, będzie silnik 512-krokowy.
Przekładnia zwiększy również moment obrotowy silnika. Niektóre drobne silniki krokowe z przekładnią posiadają zdumiewające momenty obrotowe. Lecz kompromisem oczywiście jest prędkość. Silniki krokowe z przekładnią są zazwyczaj stosowane w projektach o niskich obrotach.
Silnik krokowy z kołem zębatym
Styl wału
Następną kwestią wartą Twojej uwagi, jest współpraca silnika z resztą układu napędowego. Dostępne są silniki z wałami w różnych stylach:
- Wał "D" lub okrągły - są one dostępne w różnych standardowych średnicach. Wiele kół pasowych i zębatych, oraz złącza wału zaprojektowano tak, aby były dopasowane. Spłaszczona strona wałów "D" zapobiega poślizgowi. Właśnie one są wskazane podczas wysokich momentów obrotowych.
- Wał zębaty - niektóre wały posiadają wyfrezowane zęby przekładni. Są one zazwyczaj zaprojektowane tak, aby współpracowały z modułowymi zestawami kół zębatych.
- Wał śrubowy - silniki z wałem śrubowym są używane do budowy siłowników liniowych. Ich miniaturowe wersje to pozycjonery głowic w napędach dyskowych.
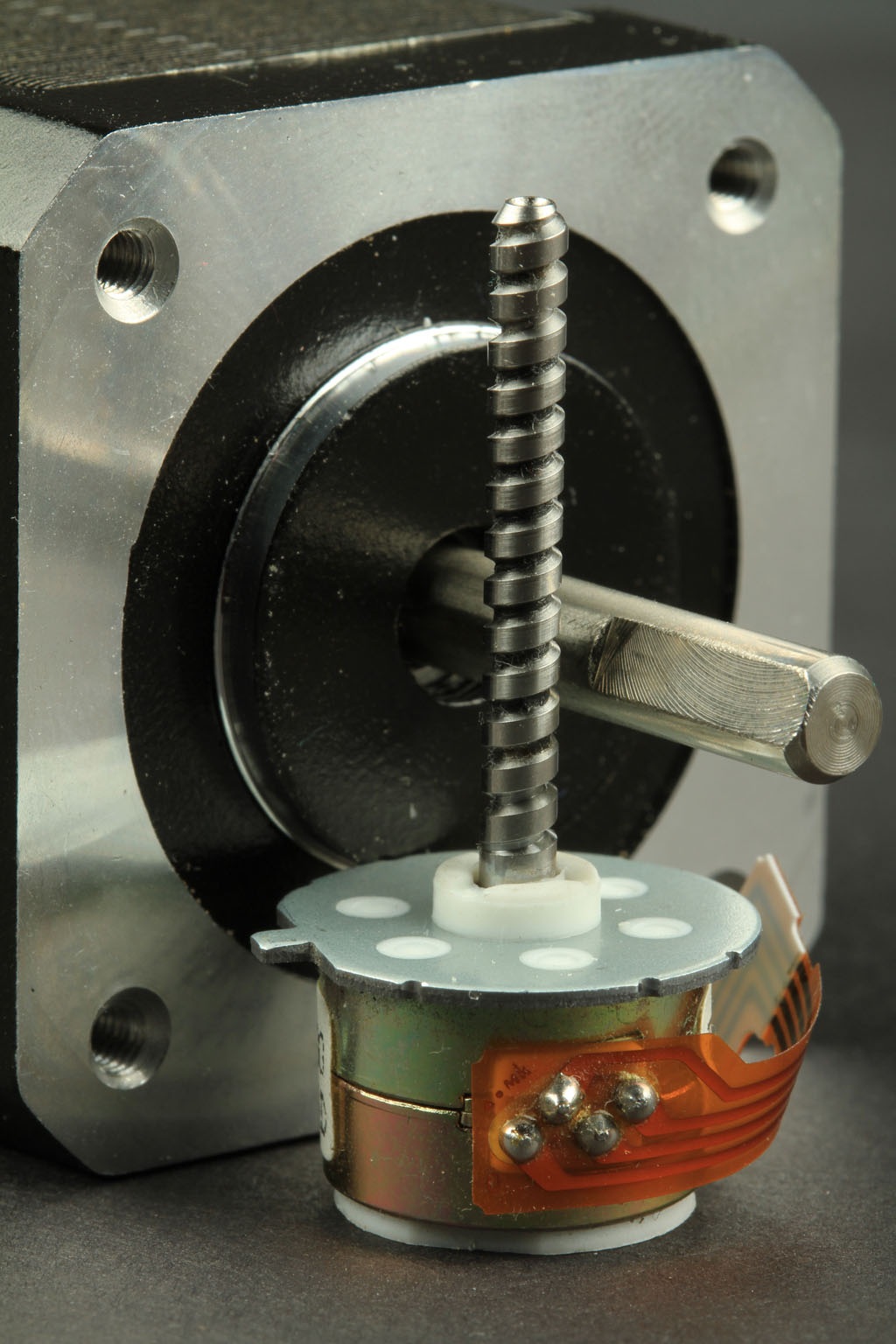
Silniki krokowe z różnymi typami wałów
Okablowanie
Istnieje wiele rodzajów okablowania w silnikach krokowych. My skupimy się na tych, które można napędzać powszechnie dostępnymi sterownikami. Są to silnik z magnesem trwałym lub hybrydowy, okablowane jako 2-fazowy bipolarny lub jako 4-fazowy unipolarny.
Okablowanie silnika krokowego
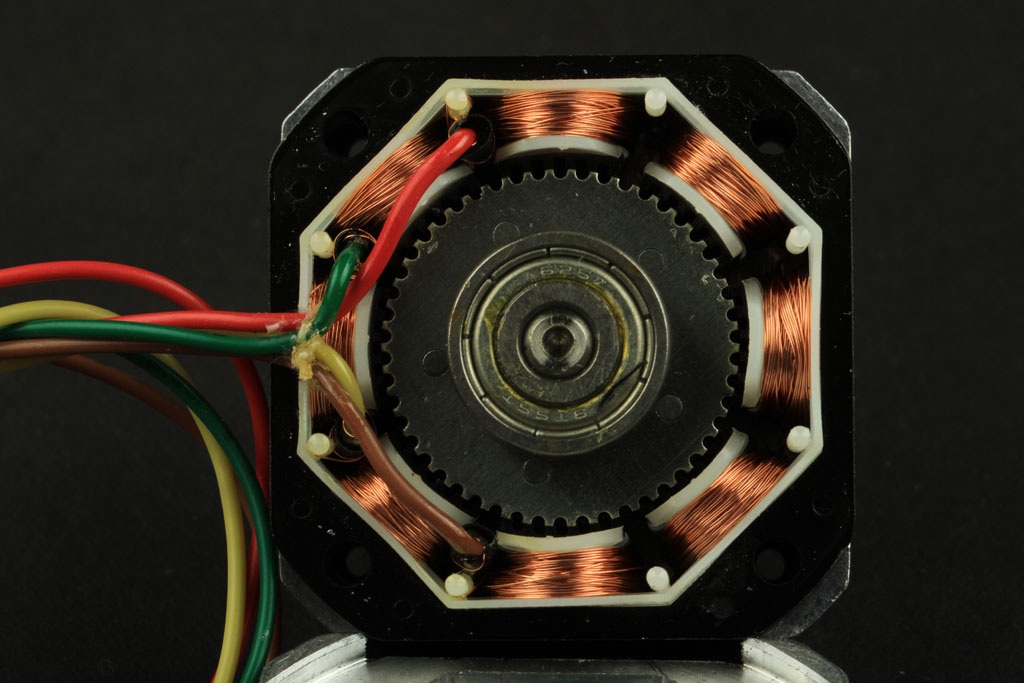
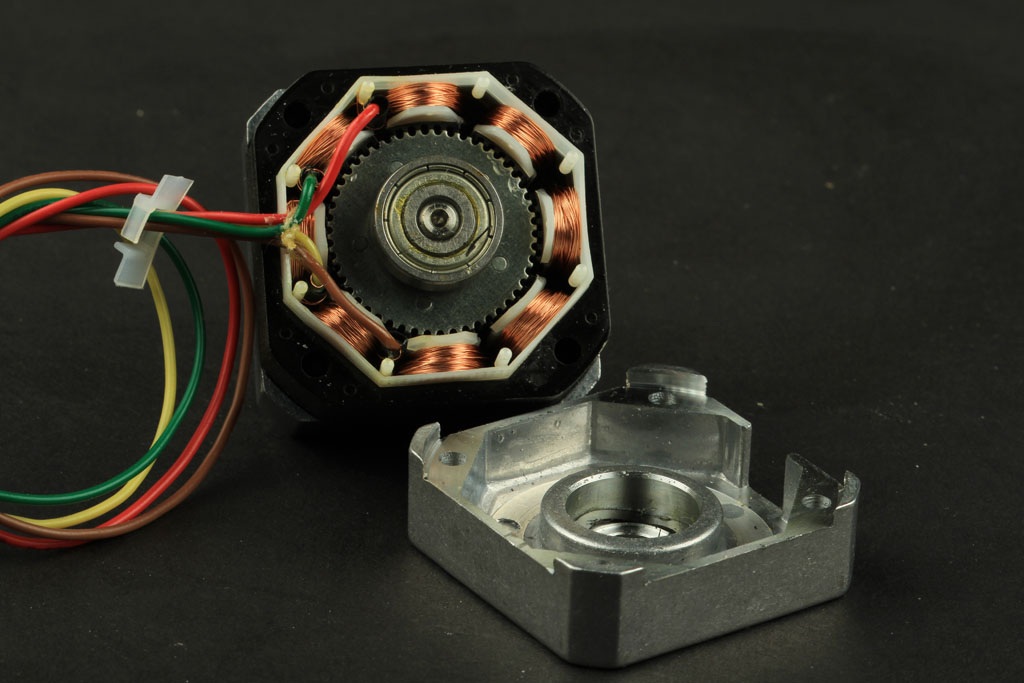
Cewki i fazy
Silnik krokowy może posiadać dowolną ilość cewek. Jednakże są one połączone w grupy nazywane "fazami". Wszystkie cewki w fazie są zasilane razem.
Fazy silników krokowych
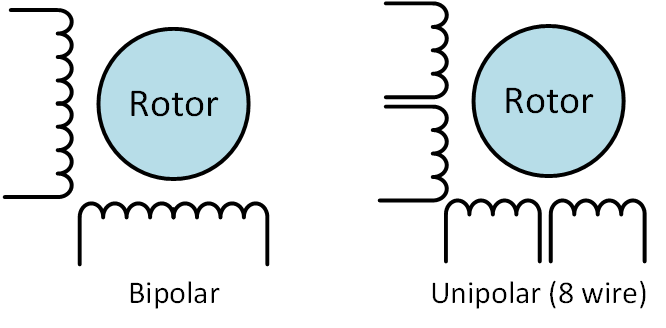
Silnik krokowy unipolarny VS silnik krokowy bipolarny
Sterownik unipolarny (silnik unipolarny) zawsze zasila fazy w ten sam sposób. Jeden "wspólny" przewód będzie zawsze z ładunkiem negatywnym. Drugi, będzie z ładunkiem pozytywnym. Sterowniki te mogą być wdrażane za pomocą prostych obwodów tranzystorowych. Jego wadą jest to, że posiada on mniej momentów obrotowych, ponieważ tylko połowa cewek może być zasilana jednocześnie.
Sterownik bipolarny (silnik bipolarny) korzysta z układu mostka H, aby móc odwrócić przepływ prądu używając faz. Zasilając je naprzemienną polaryzacją, wszystkie cewki zaczną pracować, jednocześnie włączając silnik.
Silnik dwufazowy bipolarny dysponuje 2 grupami cewek. Silnik 4-fazowy unipolarny ma takich grup 4. 2-fazowy bipolarny będzie miał 4 przewody - 2 do każdej fazy. Niektóre silniki posiadają elastyczne okablowanie co umożliwia uruchomienie silnika w trybie unipolarnym lub bipolarnym.
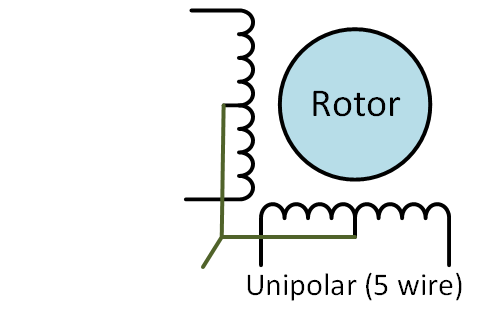
Unipolarny, 5-przewodowy
Silnik 5-przewodowy
Wszystkie wspólne przewody cewki są związane w środku i wyprowadzone jako 5 przewód. Taki silnik może działać tylko w trybie unipolarnym.
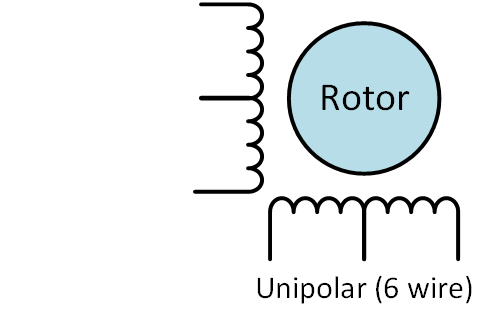
Unipolarny, 6-przewodowy
Silnik 6-przewodowy
Łączy on tylko wspólne przewody 2 sparowanych faz. Przewody mogą być połączone tak, aby stworzyć 5-przewodowy unipolarny silnik.
Możesz także używać silnika jako bipolarnego, nie zwracając uwagi na przewody.
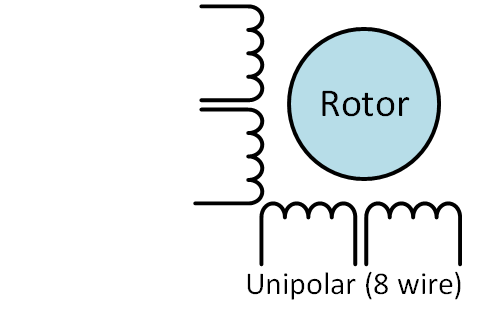
Unipolarny, 8-przewodowy
8-przewodowy silnik
Ten unipolarny silnik jest najbardziej uniwersalny ze wszystkich. Może być napędzany na wiele sposobów:
- 4-fazowo unipolarnie - wszystkie wspólne przewody są złączone - tak jak w przypadku silnika 5-przewodowego.
- 2-fazowo bipolarnie seryjnie - fazy są połączone w serie - tak jak w przypadku silnika 6-przewodowego
- 2-fazowo bipolarnie równolegle - fazy są połączone równolegle. Skutkuje to o połowę mniejszym oporem i indukcyjnością - jednakże, wymaga dwa razy więcej prądu do uruchomienia. Zaletą tego okablowania jest wyższy moment obrotowy i maksymalna prędkość.

Zestawienie silników krokowych
Sterowanie silnikiem krokowym
Sterowniki silników krokowych
Silniki krokowe - Sterowanie - Silnik krokowy jest trochę bardziej skomplikowany w użyciu niż standardowy silnik szczotkowy o prądzie stałym. Silniki krokowe muszą posiadać swój sterownik, aby móc zasilić fazy w odpowiedniej kolejności, które w ten sposób napędzą silnik.
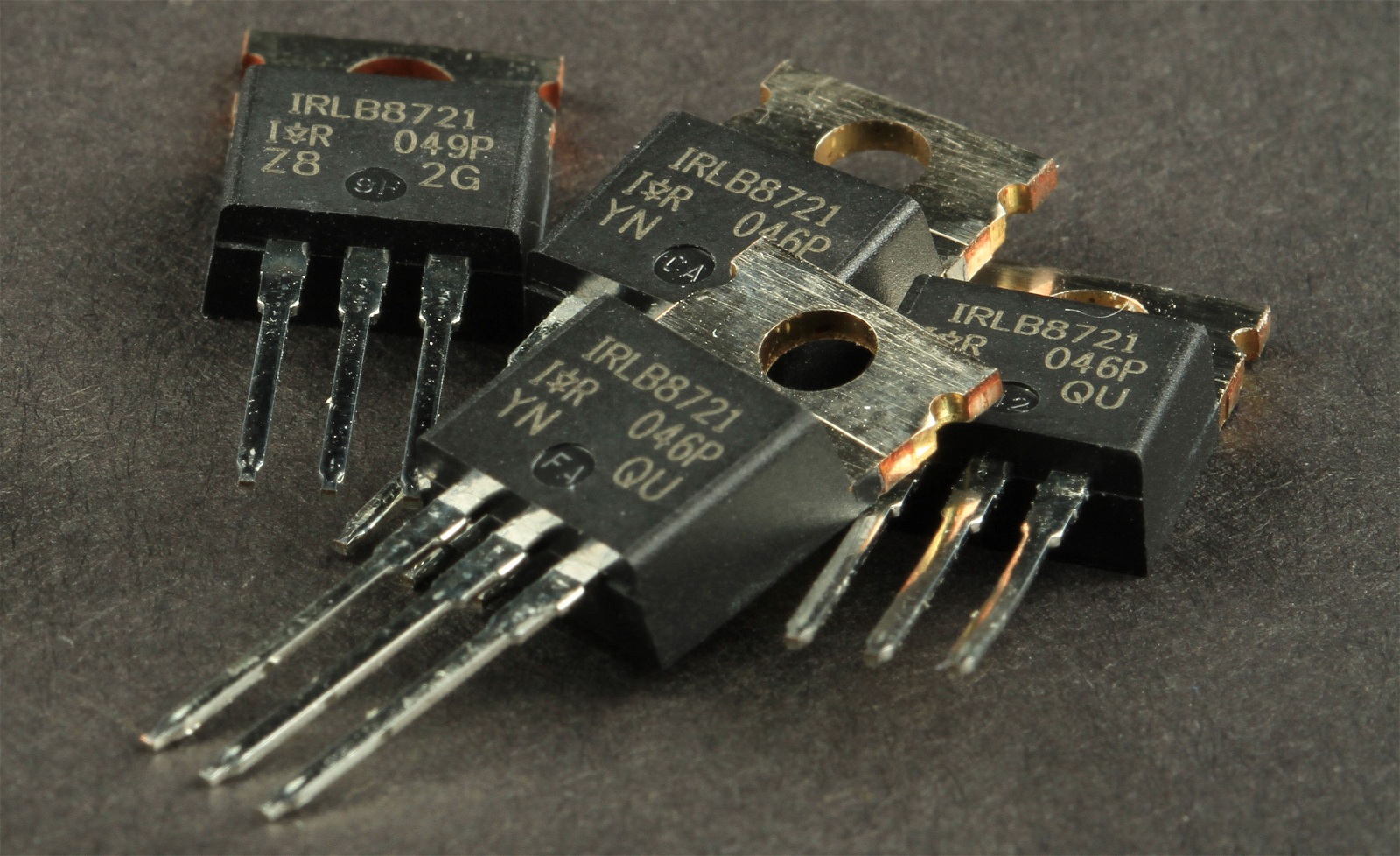
Tranzystory
Silnik krokowy - Sterowanie - Prosty sterownik unipolarny
Najprostszy rodzaj sterownika można zbudować za pomocą niewielkiej ilości tranzystorów. Są one włączane i wyłączane w sekwencji, tak, aby zasilić fazy i załączyć silnik. Budowa takich sterowników jest stosunkowo tania, ale działają one tylko z silnikami unipolarnymi. Samouczek zrobienia takiego sterownika znajdziesz na stronie Arduino.
| Przewodnik sterowania unipolarnym silnikiem krokowym |
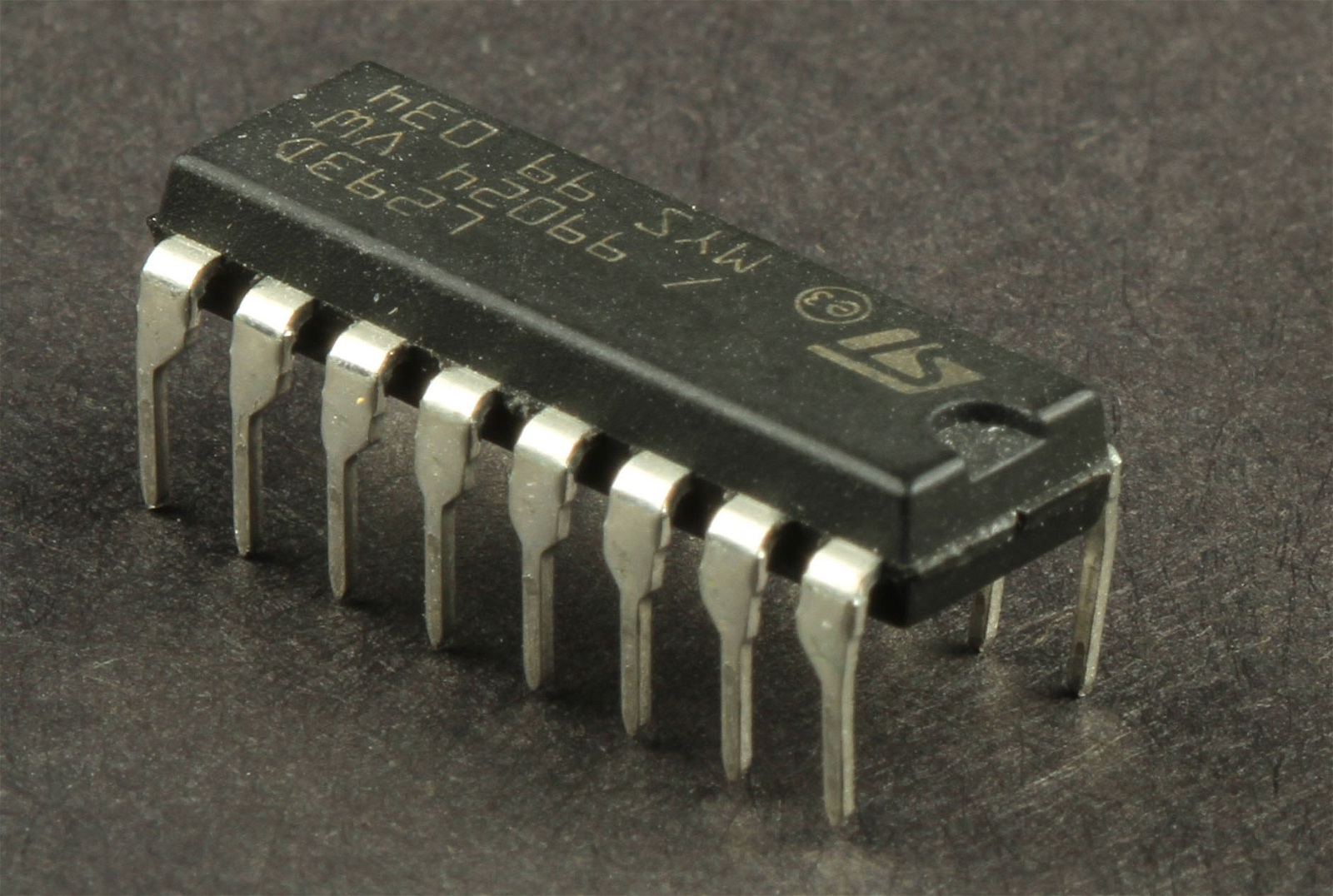
Sterownik silników krokowych - układ scalony
Prosty dwukanałowy sterownik mostkowy H
Korzystanie z silnika bipolarnego wymaga 2 pełnych mostków H, aby prąd mógł wracać do faz. Lecz zbudowanie ich od podstaw może być trudne. Dostępnych jest wiele układów mostkowych H, które mogą to ułatwić.
L293D jest jednym z najpopularniejszych i najbardziej oszczędnych układów. Może on być znaleziony w podstawach większości silników tarczowych pierwszej generacji.
W Systemie Nauki Arduino, znajdziesz świetny samouczek o tym, jak używać L293D z Arduino:
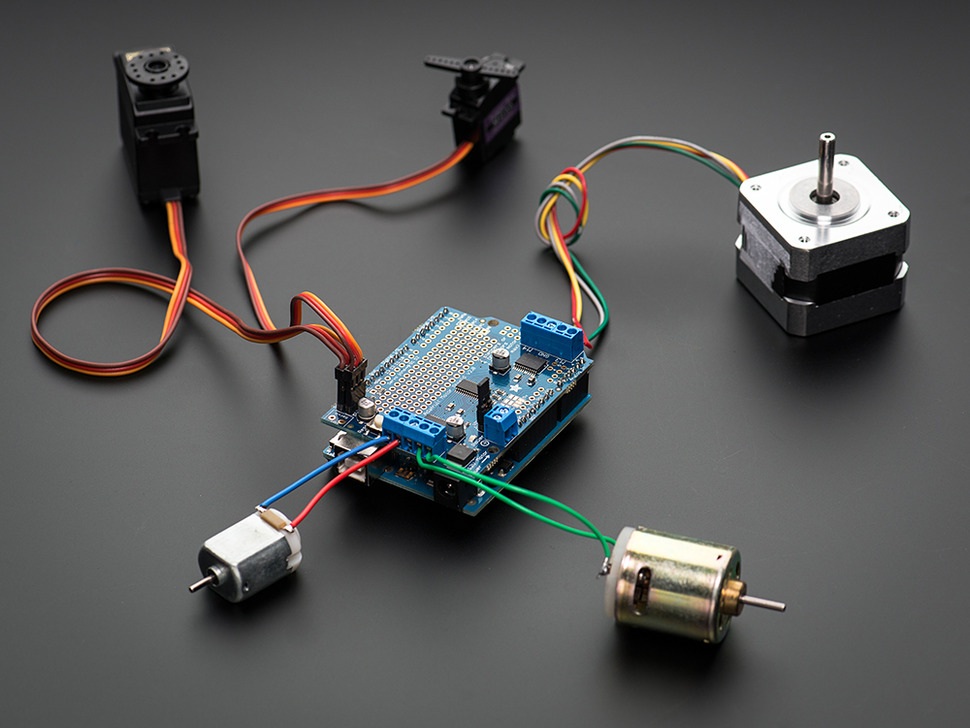
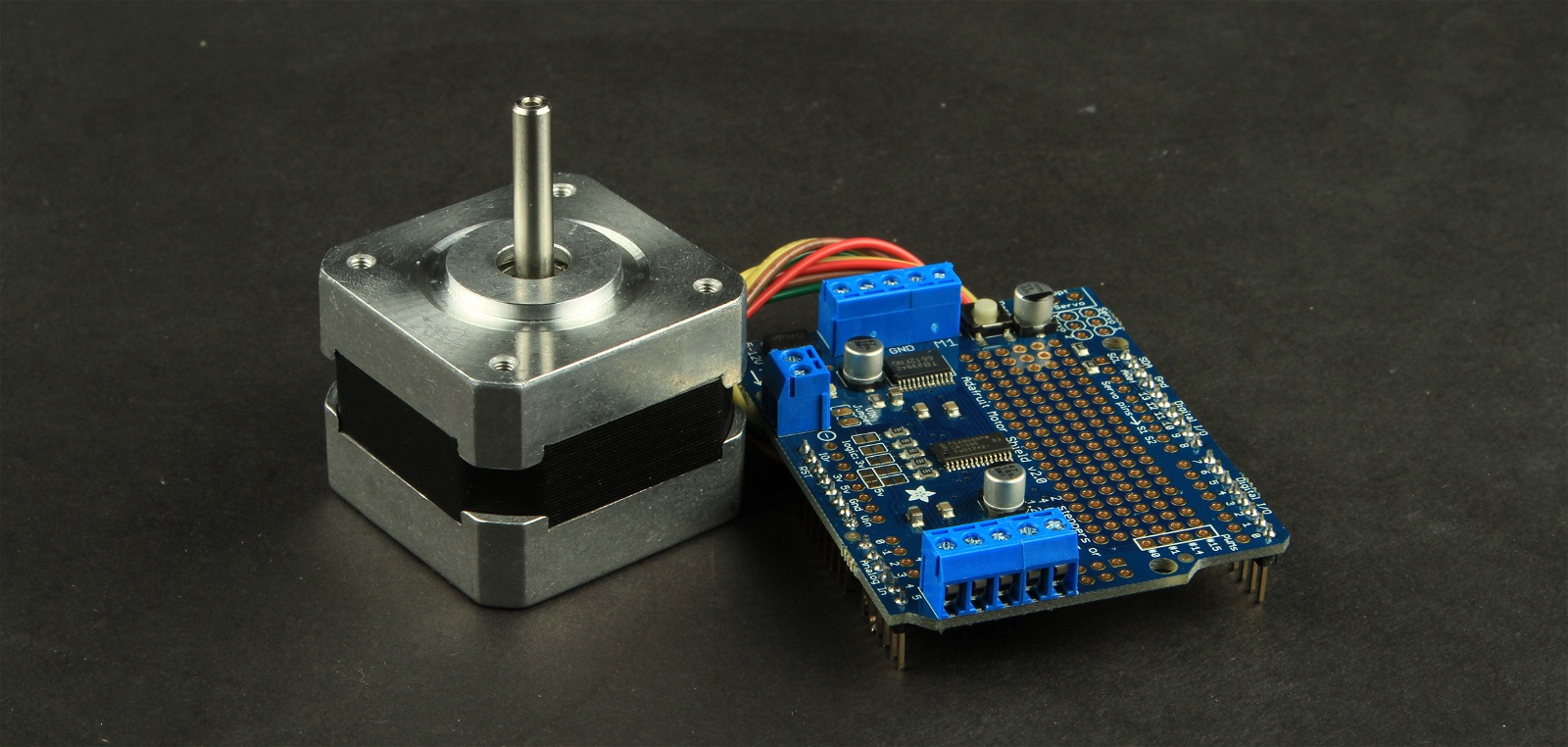
Nakładka Adafruit Motor Shield V2 z Arduino i podłączonymi silnikami
Nakładka Adafruit Motor Shield V2
Adafruit Motor Shield V2 to duży postęp w stosunku do podstawowych sterowników na bazie L239D. V2 używa dwóch sterowników TB6612 MOSFET. W porównaniu do L293D, TB6612 oferuje dwa razy większą wydajność prądu i znacznie niższe spadki napięcia, co usprawnia korzystanie z silnika krokowego.
Dzięki 2 układom sterującym i 4 mostkom H, każda nakładka może napędzać do dwóch silników. Układy sterujące są połączone poprzez układ sterujący PWM z interfejsem I2C. Zwalnia to wiele pinów GPIO, które można wykorzystać przy czymś innym, a nakładki mogą być układane jedna na drugiej. Możesz tak ułożyć maksymalnie 32 nakładki, które będą kontrolować aż 64 silniki przy pomocy 2 pinów IO.
Wszystkie informacje o tym sterowniku znajdziesz w Systemie nauczanie.
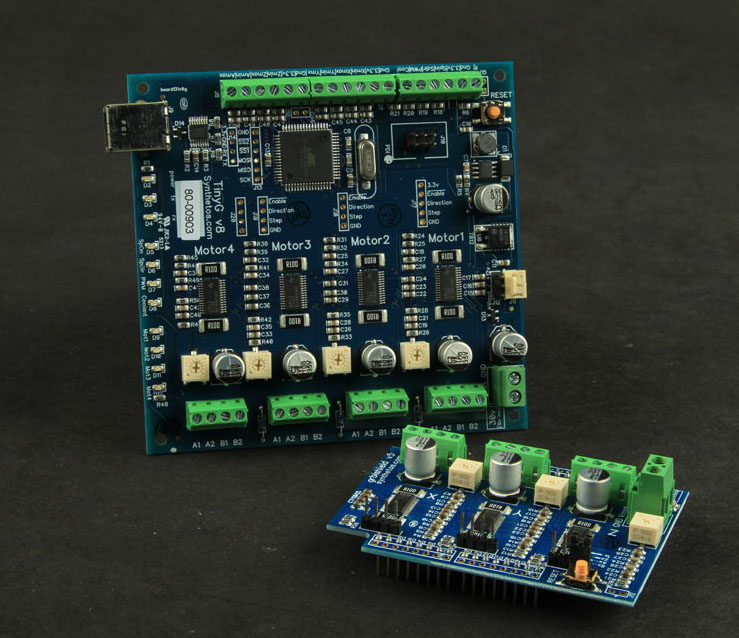
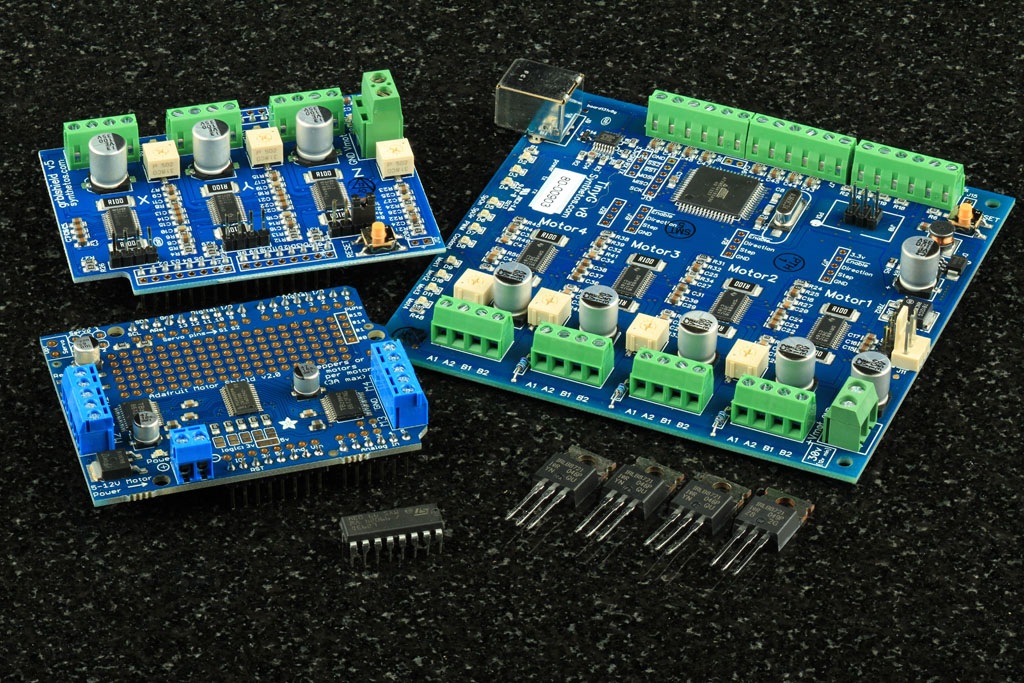
Kontroler CNC
Zaawansowane kontrolery CNC
Płytki kontrolne CNC gShield i TinyG przybliżą Cię do wydajności silnika krokowego na poziomie przemysłowym. Wyróżniają się one sterownikami prądu stałego o nazwie "chopper". Mogą być one wyregulowane w taki sposób, żeby zapewniały maksymalny moment obrotowy i prędkość silnika.
TinyG CNC posiada na płytce program interpretujący G-code i 4 wyjścia silnika. Dzięki temu, małe i średnie 4-osiowe maszyny CNC mają kompletne wbudowane rozwiązanie.
Aczkolwiek, te zaawansowane płytki o wysokiej wydajności są bardziej skomplikowane i są polecane bardziej doświadczonym użytkownikom.
Informacje o tych płytkach i ich działanie można znaleźć na TinyG Wiki i na forach Synthetos.
Dopasowywanie sterownika do silnika krokowego
Silnik krokowy podłączony ze sterownikiem
Przechodzimy teraz do najważniejszej części: upewnienie się, że silnik i sterownik są ze sobą zgodne.
Efektem ich złego dobrania może być niezadowalająca wydajność, a co gorsza, uszkodzenie silnika i/lub kontrolera.
Jeśli źle wybierzesz, może Cię spotkać to:
Zapoznaj się z parametrami sterownika
Dwa najważniejsze parametry sterownika to:
- Napięcie - maksymalne napięcie jakie może być dostarczone silnikowi
- Prąd ciągły - maksymalny prąd ciągły jaki może być dostarczony silnikowi
|
Wartości szczytowe prądu nie mają zastosowania w silnikach krokowych. Zawsze stosuj znamionowy prąd ciągły |
Jak sprawdzić silnik krokowy? - Zapoznaj się z parametrami silnika
Musisz także znać parametry silnika. Istnieją 2 istotne parametry:
- Ampery na fazę - jest to maksymalny prąd, z którym uzwojenie silnika może sobie poradzić bez przegrzania
- Opór na fazę - jest to opór elektryczny przypadający na każdą fazę
Napięcie znamionowe jest zazwyczaj podane. Oblicza się je za pomocą dwóch parametrów powyżej - jednak nie zawsze. Lepszym rozwiązaniem jest wyliczyć je samemu, także używając powyższych współczynników, ale w Prawie Ohma.
Postępuj zgodnie z prawem!
Fazy silnika krokowego są cewkami indukcyjnymi, które nie podlegają gwałtownym zmianom w przepływie prądu. Lecz pod koniec każdego skoku albo przy braku ruchu, zachowują się jak obciążenie rezystancyjne i zgodnie z Prawem Ohma.
Silnik pobiera najwięcej prądu, gdy nie pracuje. Prawo Ohma pozwala na użycie parametrów silnika, aby obliczyć prąd potrzebny sterownikowi.
Napięcie = Prąd x Opór
lub
Prąd = Napięcie / Opór
| Wzory te powinny być ściśle stosowane we wszystkich sterownikach silników krokowych o prądzie ciągłym. Dotyczy to również osłon silnika V1 i V2 od Adafruit, i praktycznie wszystkich innych kontrolerów opartych na L293D. |
Jednakże niektóre silniki mają bardzo niską rezystencję cewki. Dlatego też stosowanie tych wzorów spowoduje, że napięcie będzie niższe niż 5 V i wydajność nie będzie zadowalająca. Ten typ silnika nie pasuje do sterownika o stałym napięciu i wymaga bardziej specjalizowanego kontrolera.
Chcesz złamać prawo?
Jeśli chodzi o Prawo Ohma, to nikomu się to jeszcze nie udało. Nawet nie próbuj, bo skończy się to fatalnie. Aczkolwiek, działają tutaj także inne prawa. Prawa Lenza, Faradaya i Ohma pomogą Ci zwiększyć wydajność Twojego silnika.
Cewki silnika krokowego wytwarzają pole magnetyczne kiedy są zasilane. Według Prawa Faradaya, zmieniające się pole magnetyczne wywołuje przepływ prądu w cewce. A według Prawa Lenza, prąd ten będzie płynął w przeciwnym kierunku do prądu wytwarzając pole magnetyczne. Taki prąd zwrotny znany jest jako "Wsteczna siła elektromotoryczna" albo wsteczne EMF.
Ta siła zwiększa "impedancję" lub uskutecznia rezystancję cewki. Więc Prawo Ohma nadal obowiązuje - ale tylko do impedancji, a nie do prostej rezystancji fazy. Na początku każdego skoku, impedancja ogranicza przepływ prądu przez cewkę.
Kontroler CNC
Napędy Chopper
Napęd Chopper, lub o ciągłym prądzie, równoważy wsteczne EMF napędzając silnik wyższym napięciem. Napędzanie silników krokowych kilkakrotnie wyższym napięciem niż znamionowe używając napędu chopper, jest czymś normalnym.
Przy tak wysokich napięciach, trzeba zadbać o bezpieczeństwo. W tym celu, napęd chopper monitoruje także prąd dostarczany do silnika i "ścina" go przed przekroczeniem pierwotnie ustalonego poziomu.
Zaczynając od wyższych napięć, nasz sterownik jest w stanie dostarczyć więcej prądu do cewek na początku skoku, zwiększając przy tym dostępny moment obrotowy. Dodatkowo, pozwala on na większe maksymalne prędkości.
Musisz zrozumieć działanie silnika i kontrolera, jeśli chcesz dobrać sterownik chopper i skonfigurować go z konkretnym silnikiem.
FAQ
Czy ten silnik będzie działać z moją nakładką?
Musisz sprawdzić parametry silnika i kontrolera. Następnie wejdź w akapit "Dopasowywanie sterownika do silnika krokowego" i zobacz czy są zgodne.
NEMA 17 powinien działać... prawda?
Wielkość NEMA określa tylko rozmiar montażowej płyty czołowej. Aby dowiedzieć się czy jest zgodna, musisz znać elektryczne parametry silnika.
Dobór silnika krokowego - Jaki rozmiar silnika mam dobrać do mojego projektu?
Większość silników posiada parametry momentu obrotowego - zazwyczaj w calach / uncje lub niutonach / centymetry. Jeden niuton / centymetr oznacza, że silnik może wywierać siłę jednego niutona na jeden centymetr ze środka wału. Na przykład, może on wytrzymać jeden niuton siły, używając koła pasowego o średnicy 2 centymetrów.
Obliczając moment obrotowy, upewnij się, że uwzględniony został dodatkowy, który wymagany jest przy przyspieszeniu i do pokonania tarcia. Aby coś podnieść potrzebny jest większy moment obrotowy, niż żeby to utrzymać.
Jeśli Twój projekt wymaga dużego momentu obrotowego, ale małej prędkości, sprawdź silnik krokowy z przekładnią.
Jak podłączę silnik do nakładki?
Sprawdź specyfikację silników, jeśli takową posiadasz.
Zasilanie silnika krokowego - Czy taki zasilacz będzie działać z moim silnikiem?
Po pierwsze, upewnij się, że nie przekracza on napięcia znamionowego wyznaczonego dla kontrolera silnika.* Uruchomisz go przy niskim napięciu, jednakże może on wtedy mieć mniejszy moment obrotowy.
* Odnosi się to tylko do sterowników o stałym prądzie.
Rodzaje silników krokowych