Zestaw do budowy 2-kołowej platformy inteligentnego robota JetBot. Zadania kontrolera hosta przyjmuje Waveshare Jetson Nano Kit, który jest wyposażony w Jetson Nano Module 16GB w wersji eMMC, 4GB pamięci. Kontroler ten jest odpowiedzialny za sztuczną inteligencję, przetwarzanie mowy, przetwarzanie wizualne, mapowanie oraz nawigację. Kontroler Jetson Nano Developer Kit wykorzystuje dwurdzeniowy mikrokontroler Raspberry Pi RP2040, który ma lepszą wydajność w czasie rzeczywistym i wyższą dokładność sterowania, jest odpowiedzialny za zbieranie danych o postawie i kontrolę ruchu. JetBot posiada funkcje wykrywania twarzy, podążania za obiektem czy też linią. Urządzenie jest wstanie mapować za pomocą licznika kilometrów oraz obsługuje algorytm mapowania Gmapping, Hector, Karto i Cartographer.

JetBot - zestaw do budowy 2-kołowej platformy robota Al - pełny zestaw - Waveshare 22791.
JetBot - zestaw do budowy 2-kołowej platformy robota Al z kamerą - mapowanie trasy.
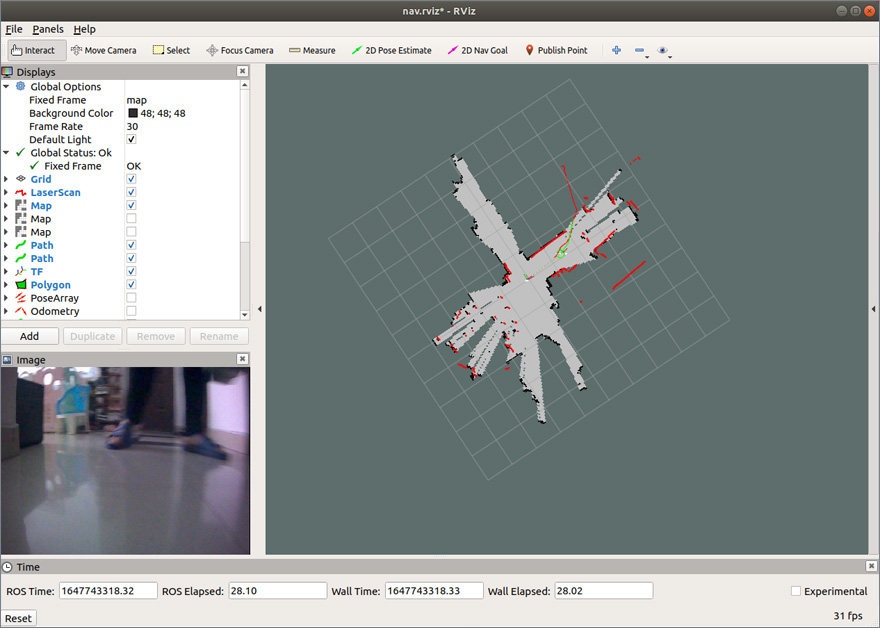
ROS to system operacyjny typu open-source, który zawiera zbiór bibliotek oprogramowania i narzędzi do projektowania robotów. Zapewnia usługi oczekiwane od systemu operacyjnego, kontrolę urządzeń w warstwie dolnej, przekazywanie komunikatów między procesami oraz zarządzanie pakietami. ROS upraszcza projektowanie robotów i jest głównym nurtem oprogramowania robotów na świecie. Oprogramowanie do ROS: rviz, gazebo, rosbang, rqt_*
JetBot obsługuje nawigację jednopunktową, wielopunktową nawigację patrolową oraz mapowanie w czasie rzeczywistym.
Nawigacja jednopunktowa: po wskazaniu pozycji docelowej, robot automatycznie zaplanuje ścieżkę, aby nawigować do pozycji docelowej.
Wielopunktowa nawigacja patrolowa: po dodaniu punktów nawigacyjnych, robot będzie się pomiędzy nimi poruszał.
Mapowanie podczas nawigacji: po wskazaniu punktu docelowego robot automatycznie zbada ścieżkę do punktu docelowego oraz pokaże ją na mapie

Zawartość zestawu.
 JetBot - zestaw do budowy 2-kołowej platformy robota Al.
JetBot - zestaw do budowy 2-kołowej platformy robota Al.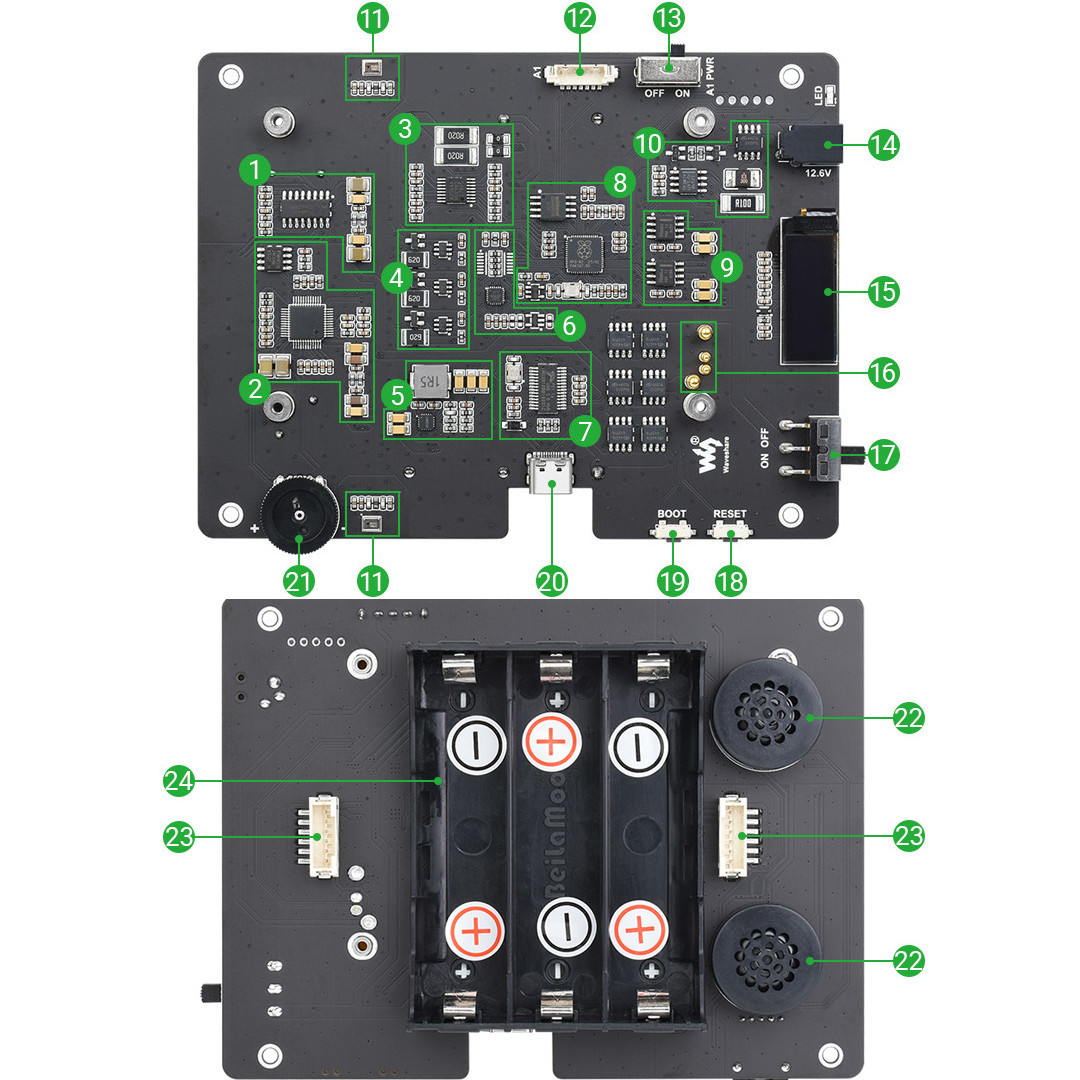
Opis wyprowadzeń na płytce.
Przydatne linki |
| Podwozie - ilość kół | 2 |
| Podwozie - typ | kołowe |
| Podwozie + napęd | Tak |
| Podwozie + sterownik | Tak |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 35.3 cm |
| Wysokość opakowania | 21 cm |
| Głębokość opakowania | 21 cm |
| Masa opakowania | 2.123 kg |
| Marek Długosz
07/29/25 | Pytanie: Dzień dobry, Czy zestaw zawiera ogniwa 18650 czy też trzeba je dokupić odzielnie? Pozdrawiam |
Odpowiedź: Zestaw nie zawiera akumulatorów - należy je nabyć osobno. | |

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Seednew Limited 3/F, Building 6, Shanglilang Zhichuangyuan, Pingji Avenue, Nanwan Street, Longgang District, Shenzhen, 518115, China
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin