Zestaw do budowy 2-kołowej platformy inteligentnego robota JetBot. Do poprawnej pracy robot wymaga kontrolera Waveshare Jetson Nano Kit wyposażonego w Nvidia Jetson Nano Module z 4 GB pamięci RAM i 16 GB pamięci eMMC. Kontroler ten jest odpowiedzialny za sztuczną inteligencję, przetwarzanie mowy, przetwarzanie wizualne, mapowanie oraz nawigację. Zestaw wyposażony został w dodatkowy mikrokontroler jakim jest Raspberry Pi RP2040, który cechuje się wysoką wydajnością w czasie rzeczywistym i dokładnością sterowania. Jest on odpowiedzialny za zbieranie danych o pozycji robota i za kontrolę ruchów. JetBot posiada funkcje wykrywania twarzy, podążania za obiektem czy też linią. Urządzenie jest wstanie mapować za pomocą licznika kilometrów oraz obsługuje algorytm mapowania Gmapping, Hector, Karto i Cartographer.
Zestaw nie zawiera minikomputera Waveshare Jetson Nano Dev Kit, karty pamięci TF czy też czytnika kart, można te elementy nabyć osobno.
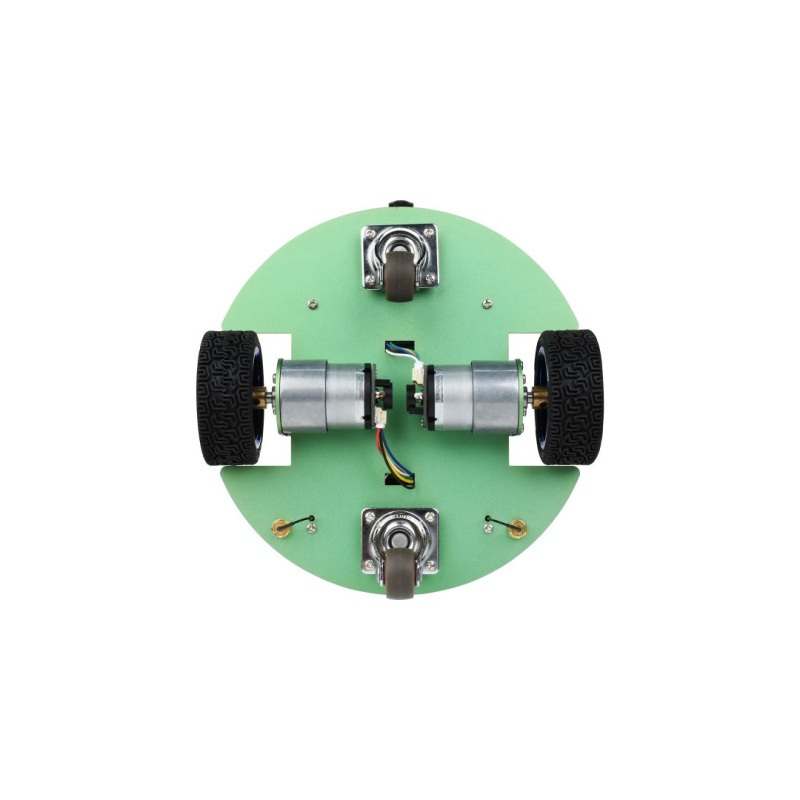
JetBot - zestaw do budowy 2-kołowej platformy robota Al z kamerą i napędem DC.
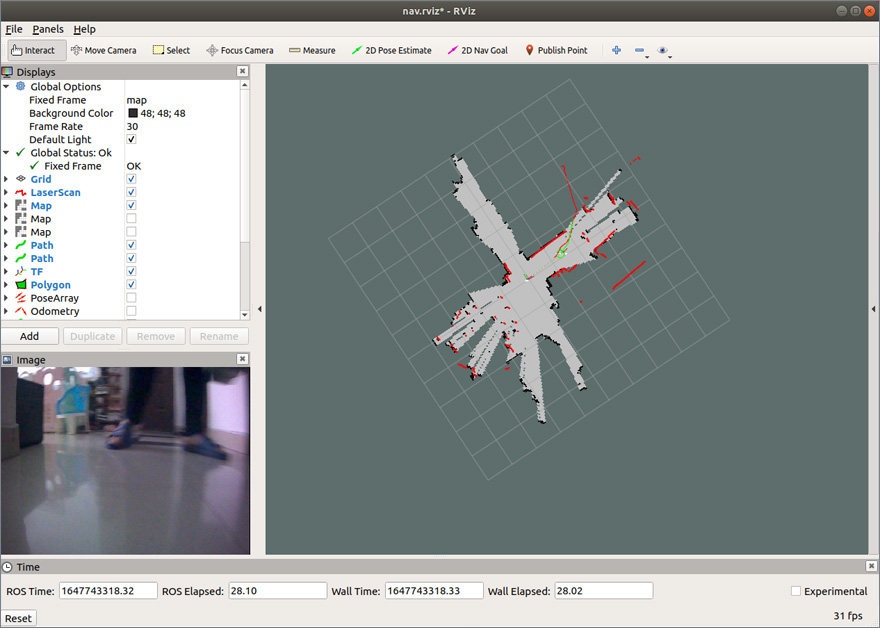
JetBot - zestaw do budowy 2-kołowej platformy robota Al z kamerą - mapowanie trasy.
ROS to system operacyjny typu open-source, który zawiera zbiór bibliotek oprogramowania i narzędzi do projektowania robotów. Zapewnia usługi oczekiwane od systemu operacyjnego, kontrolę urządzeń w warstwie dolnej, przekazywanie komunikatów między procesami oraz zarządzanie pakietami. ROS upraszcza projektowanie robotów i jest głównym nurtem oprogramowania robotów na świecie. Oprogramowanie do ROS: rviz, gazebo, rosbang, rqt_*
JetBot obsługuje nawigację jednopunktową, wielopunktową nawigację patrolową oraz mapowanie w czasie rzeczywistym.
Nawigacja jednopunktowa: po wskazaniu pozycji docelowej, robot automatycznie zaplanuje ścieżkę, aby nawigować do pozycji docelowej.
Wielopunktowa nawigacja patrolowa: po dodaniu punktów nawigacyjnych, robot będzie się pomiędzy nimi poruszał.
Mapowanie podczas nawigacji: po wskazaniu punktu docelowego robot automatycznie zbada ścieżkę do punktu docelowego oraz pokaże ją na mapie

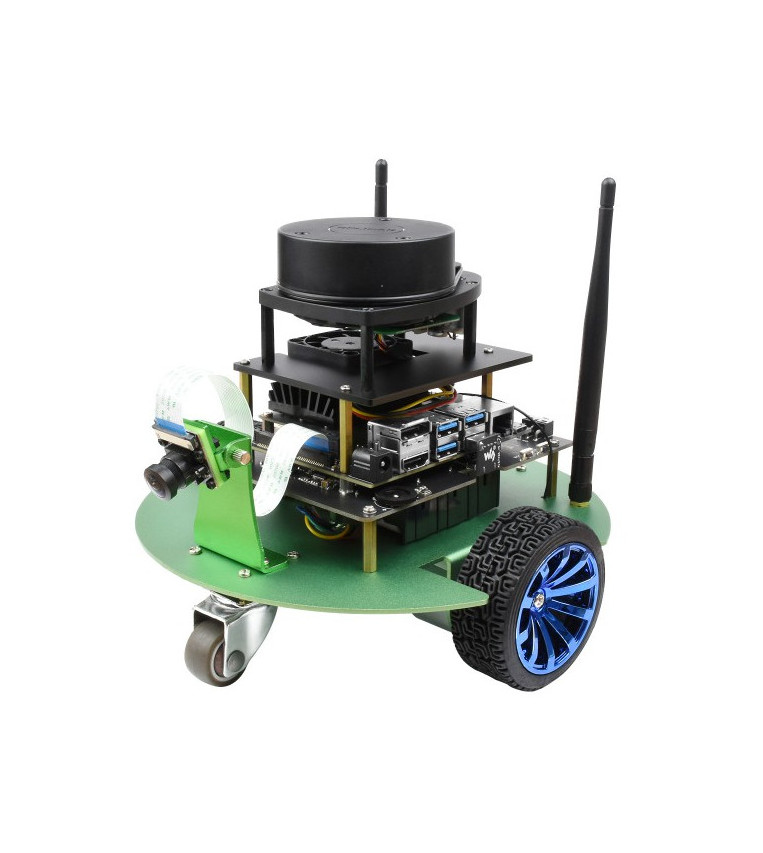
JetBot - zestaw do budowy 2-kołowej platformy robota Al - zestaw.
 JetBot - zestaw do budowy 2-kołowej platformy robota Al.
JetBot - zestaw do budowy 2-kołowej platformy robota Al.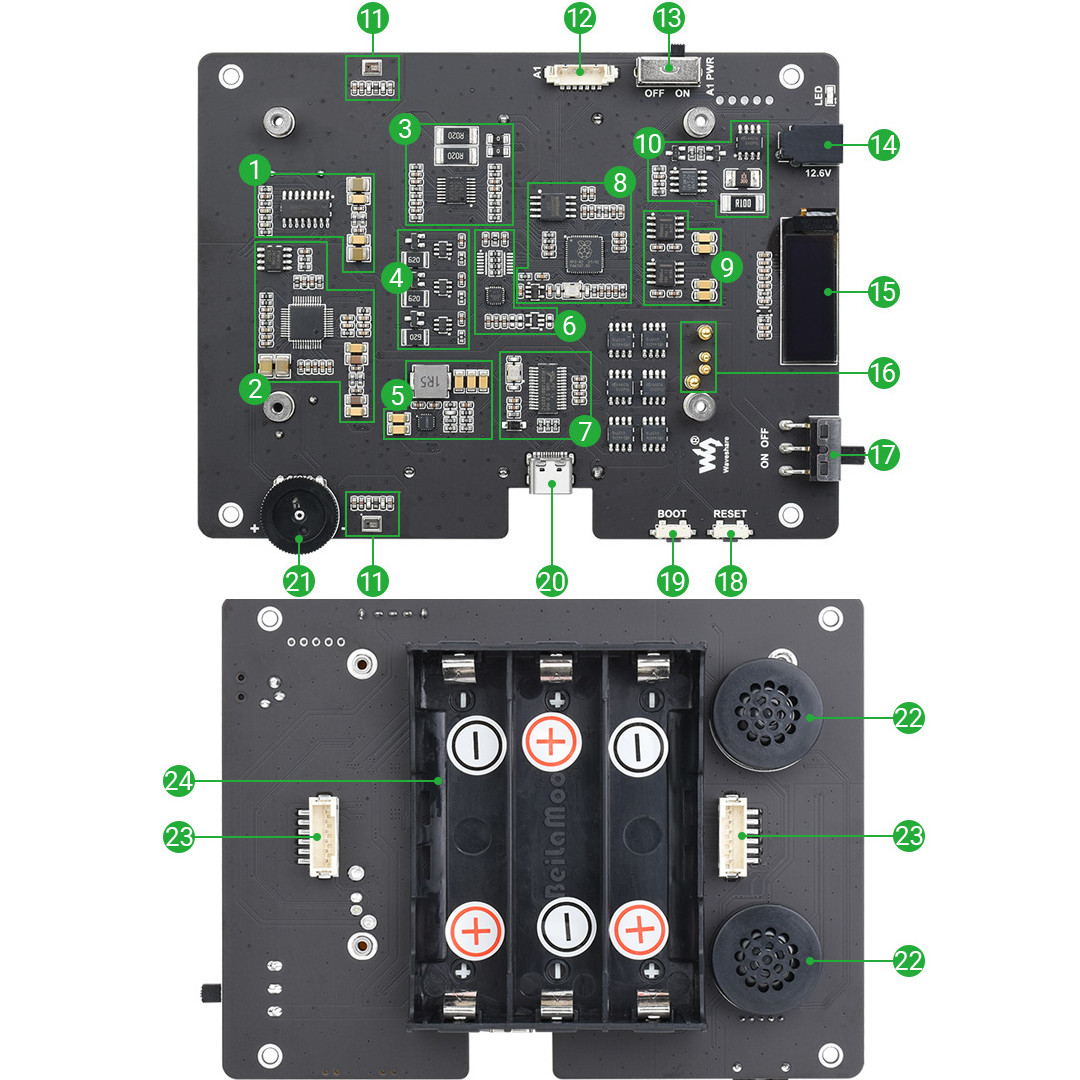
Opis wyprowadzeń na płytce.
Przydatne linki |
| Podwozie - ilość kół | 2 |
| Podwozie - typ | kołowe |
| Podwozie + napęd | Tak |
| Podwozie + sterownik | Tak |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 35 cm |
| Wysokość opakowania | 20 cm |
| Głębokość opakowania | 20.5 cm |
| Masa opakowania | 1.905 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Seednew Limited 3/F, Building 6, Shanglilang Zhichuangyuan, Pingji Avenue, Nanwan Street, Longgang District, Shenzhen, 518115, China
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin