

































































































































































































































































































- Produkt wycofany
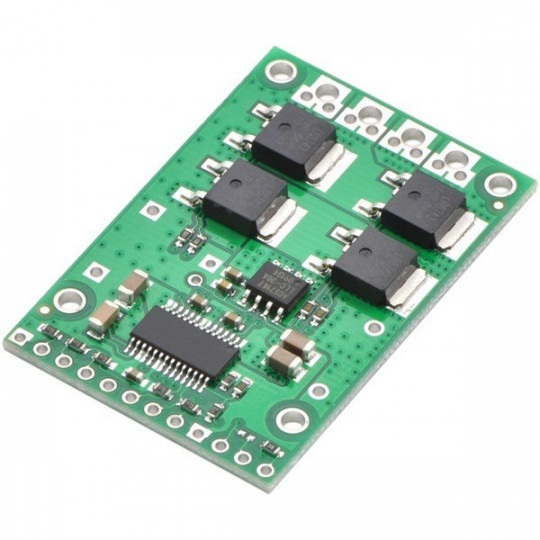
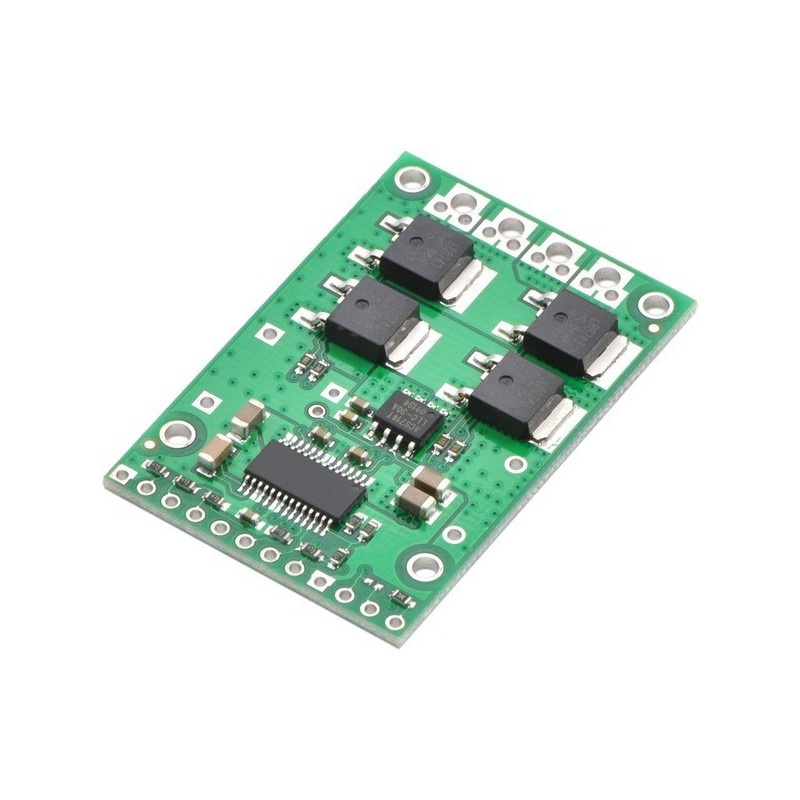





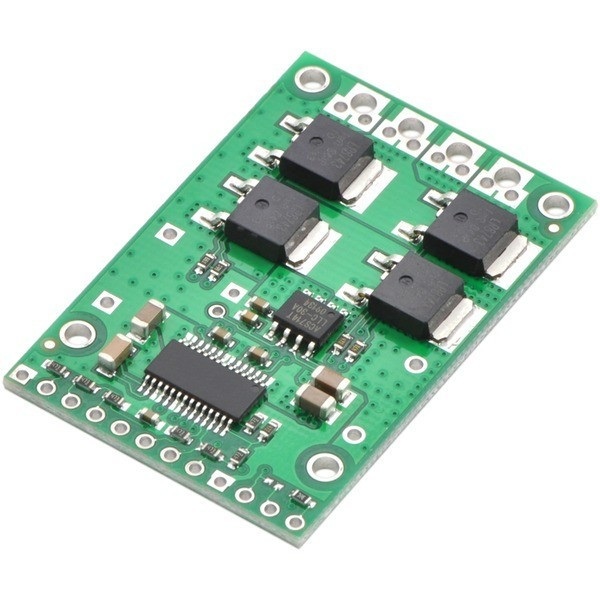
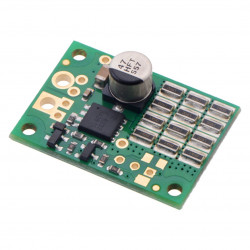
Oparty na tranzystorach MOSFET wydajny mostek H pozwala kontrolować obroty silnika w obu kierunkach. Zasilanie silników: od 5,5 V do 50 V. Prąd maksymalny: 20 A.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
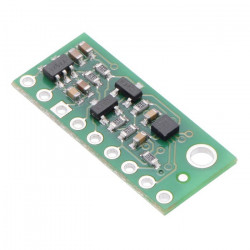
Sterownik oparty na tranzystorach MOSFET pozwala kontrolować jeden silnik prądu stałego zasilany napięciem od 5,5 V do 50 V o poborze prądu do 20 A.
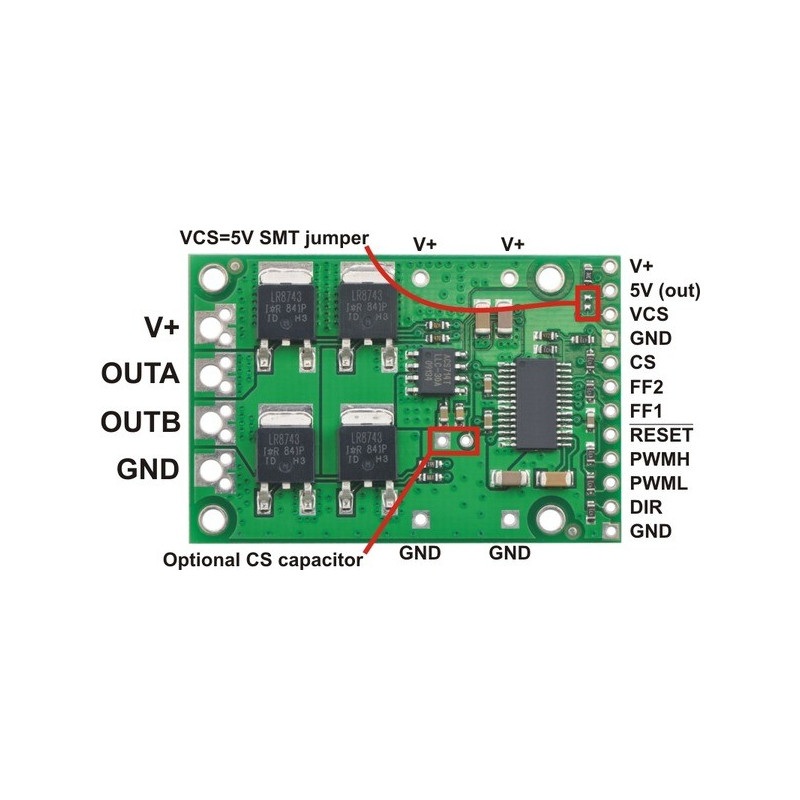
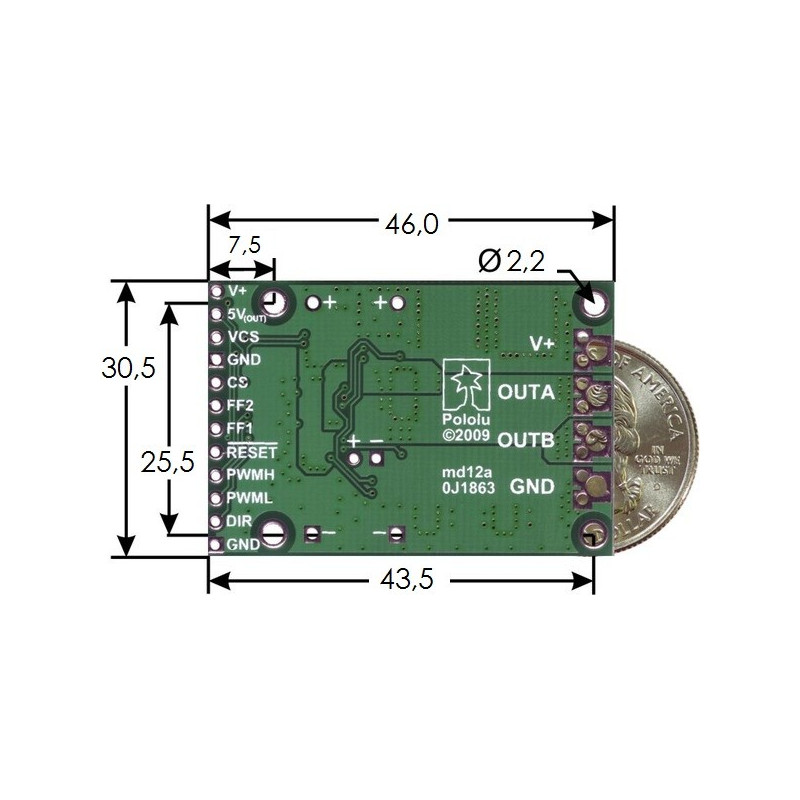
Wyprowadzenia zostały rozmieszczone po obu stronach modułu. Po jednej umieszczono konektory odpowiedzialne za sterowanie oraz zasilanie części logicznej. Na przeciwnej krawędzi znajdują się piny zasilania silnika (V+, GND) oraz jego wyjścia (OUTA, OUTB). Wartość napięcia sygnałów sterujących powinna mieścić się w zakresie od 3,5 V do 5,5 V. Producent nie zaleca pracy na napięciem 3,3 V.
W standardowym zastosowaniu wymagane jest jedynie podłączenie sygnału PWMH oraz pinu wyboru kierunku obrotów silnika DIR. Flagi FF1 oraz FF2 sygnalizują nieprawidłową pracę układu. Pin RESET domyślnie jest podciągnięty do zasilania. Gdy zostanie doprowadzony stan niski, układ przejdzie w stan minimalnego poboru energii. Zresetowane zostaną także wszystkie flagi.

| PIN | Opis |
|---|---|
| V+ | Zasilanie silnika (5,5V-30V). Wyprowadzenie oznaczone znakiem + to biegun dodatni podłączenia kondensatora. Mniejsze wyprowadzenia V+ pozwala monitorować zasilanie silnika. Nie zaleca się używania dla wysokich prądów. |
| 5V (out) | Wyjście stabilizatora napięcia 5V. Prąd wyjściowy do kilku mA. Należy uważać aby nie doszło do zwarcia z sąsiednim pinem V+ gdyż prowadzi to do nieodwracalnego uszkodzenia modułu. |
| VCS | Zasilanie czujnika natężenie prądu - należy podłączyć napięcie 5 V |
| GND | Potencjał masy układu. |
|
OUTA OUTB |
Wyprowadzenia dla silnika DC. |
|
CS |
Wyjście czujnika prądu ACS714 o czułości 66 mV/A |
| PWMH | Sygnał sterujący prędkością obrotową. Domyślnie w stanie niskim |
| PWML | |
| DIR | Wybór kierunku obrotów silnika. W stanie wysokim prąd płynie z wyprowadzenia OUTA do OUTB. Domyślnie w stanie pływającym (float). |
| RESET | Po podaniu stanu niskiego układ jest w stanie niskiego poboru energii. Kasuje też wszystkie flagi. |
|
FF1 FF2 |
Flagi stanu układu. W przypadku wystąpienia błędu pojawia się stan wysoki. |
Wejścia układu współpracują z logiką 5 V. Minimalnym napięciem odczytywanym jako stan niski jest 3,5 V. Producent zaleca stosowanie konwertera poziomów logicznych w przypadku pracy z napięciami 3,3 V.
Stan wyprowadzeń FF1 oraz FF2 informują użytkownika o aktualnym stanie pracy układ HighPower. Opis poszczególnych sekwencji został przedstawiony w tabeli poniżej.
| FF1 | FF2 | Opis | Zablokowane wyjścia |
| L | L | Brak błędów | NIE |
| L | H | Zwarcie | TAK |
| H | L | Zbyt wysoka temperatura | NIE |
|
H |
H |
Zbyt niskie napięcie | NIE |
Sterownik może pracować w kilku różnych trybach:
| Tabela prawdy | |||||
| PWMH | PWML | DIR | OUTA | OUTB | Tryb |
| H | H | L | GND | V+ | do przodu |
| H | H | H | V+ | GND | do tyłu |
| L | H | X | GND | GND | hamowanie lekkie |
| H | L | X | V+ | V+ | hamowanie silne |
| L | L | X | Z | Z | bieg jałowy |
X = stan bez znaczenia
Z = stan wysokiej impedancji - wyjścia odłączone
Przydatne linki |
| Napięcie zasil. od | 5.5 V |
| Napięcie zasil. do | 50.0 V |
| Wydajność prąd | 20.0 A |
| Ilość kanałów | 1 |
| Szerokość opakowania | 0 cm |
| Masa opakowania | 0.016 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin