
















































































































































































































































































































































































- Produkt wycofany












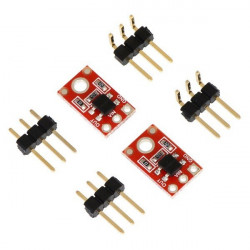
Zestaw dwóch kół o rozmiarze 42 x 19mm z optycznymi czujnikami prędkości obrotowej (enkoderami) oraz mocowaniami do silników.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne urządzenia w tej kategorii. |
* Możliwe jest również zasilanie napięciem 3,3 V poprzez odpowiednią kalibrację.

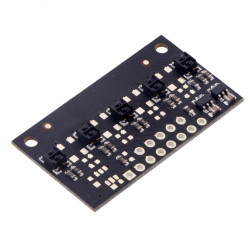
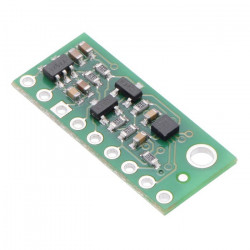
Optyczne enkodery kwadraturowe, zaprojektowane dla micro silników Pololu, składają się z dwóch transoptorów odbiciowych, działających w paśmie podczerwieni. Pomiar odbywa się poprzez odczytanie aktualnej pozycji czujnika przy pomocy ząbków i szczelin w feldze koła. Sygnały wyjściowe są przesunięte w fazie o około 90 stopni. Pozwala to na rozróżnienie kierunku obrotów. Wyjścia podłączone są poprzez komparatory z histerezą, dzięki czemu sygnał jest pozbawiony zakłóceń. Rozdzielczość enkoderów wynosi 48 impulsów na obrót.
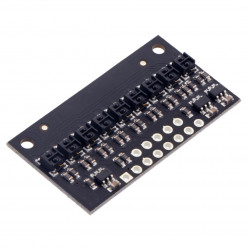
Niewielkie rozmiary pozwalają zamontować czujniki pomiędzy silnikiem a podwoziem poprzez mocowania przedłużone.
Przykładowy kod obsługi czujników dla mikrokontrolerów AVR można znaleźć w bibliotece Pololu AVR pod adresem: link.
|
Uwaga! Koła z enkoderami współpracują z micro silnikami Pololu z przekładniami od 5:1 do 298:1. Czujniki nie obsługują silników z przekładnią 1000:1. |
Czujniki można ustawić dla pracy z napięciem zasilania 3,3V. W tym celu należy zmostkować rezystor R4 (widoczny na schemacie poniżej). W praktyce oznacza to przylutowanie kawałka drucika pomiędzy dwa pady rezystora R4, lub całkowite usunięcie tego rezystora i zastąpienie go zworką. Operacja ta zmniejszy rezystancję całkowitą w obwodzie diod nadawczych czujników IR. Pozostanie tylko rezystor R1 o wartości 100 Ω (plus rezystancja samych diod).
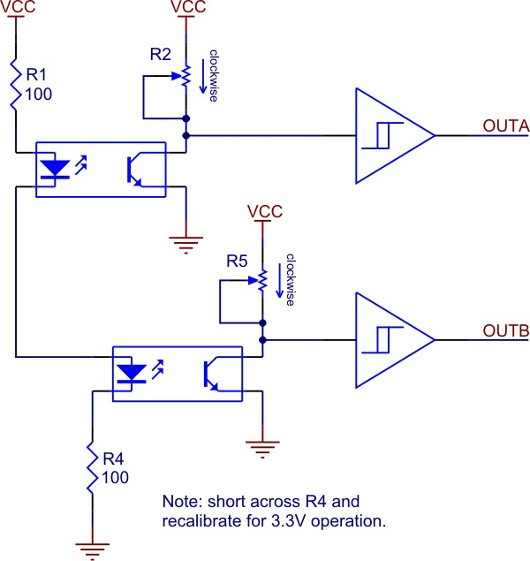
Schemat modułu enkoderów optycznych Pololu.
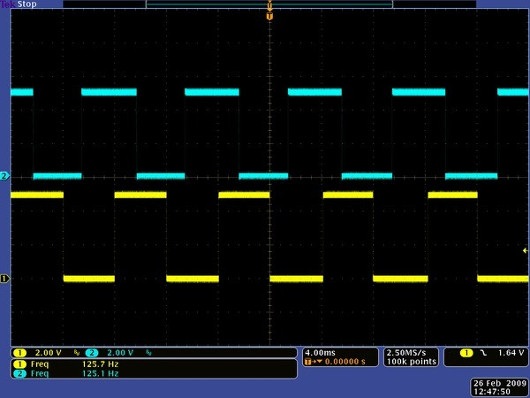
Kolejnym etapem jest kalibracja czujników. W tym celu należy użyć małych potencjometrów znajdujących się na płytce. Poprawnie skalibrowanie enkodery powinny wysyłać sygnał o wypełnieniu około 50%. Kalibrację ułatwia użycie oscyloskopu, jednak równie dobrze można tego dokonać z samym mikrokontrolerem, mierząc wypełnienie sygnału.
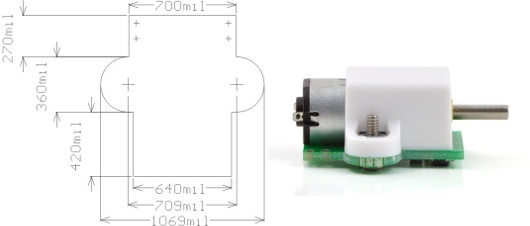
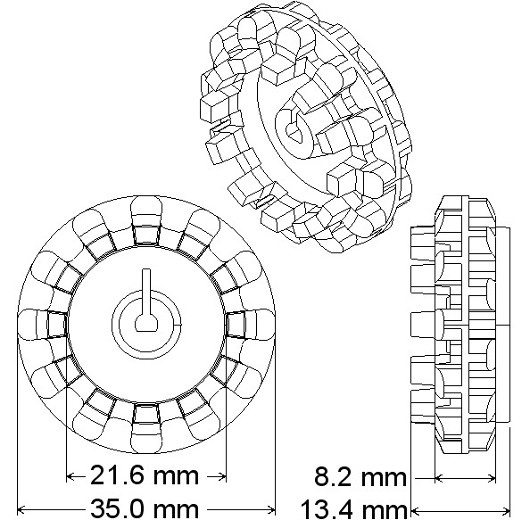
Dzięki dużym bieżnikom koła są odporne na nierówności i zanieczyszczenia na powierzchni po której się poruszają. Koła zostały zaprojektowane, aby pasowały na wcisk do wałów micro silników Pololu.

Średnica opony to 42 mm, jej szerokość wynosi 19mm. Wymiary felgi podane zostały na rysunku poniżej.
Przydatne linki |
| Szerokość opakowania | 0.001 cm |
| Wysokość opakowania | 0.001 cm |
| Głębokość opakowania | 0.001 cm |
| Masa opakowania | 0.001 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Polska
Dane kontaktowe producenta: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]


















