

















































































































































































































































































































































































































- Produkt wycofany









|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
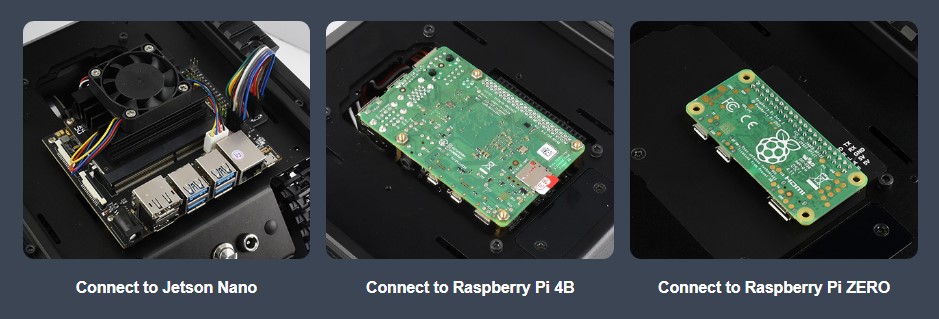
UGV01 to zaawansowany robot mobilny typu crawler, wyposażony w niezależne systemy zawieszenia, które umożliwiają doskonałe poruszanie się po trudnym terenie. Wbudowany sterownik podwozia jest oparty na ESP32, co powoduje, że możliwe jest sterowanie robotem w sposób całkowicie zdalny. Steruje się przy pomocy internetowej przeglądarki bez konieczności instalacji dodatkowych aplikacji. Jest także kompatybilny z różnymi minikomputerami, w tym Raspberry Pi i Jetson Nano oraz posiada otwarte oprogramowanie typu open-source, zapewniając łatwą personalizację i rozwój projektów. Podwozie jest zasilane trzema ogniwami typu 18650 oraz zawiera także zabezpieczenia przed przeładowaniem, nadmiernym rozładowaniem czy zwarciem.
Producent przygotował przewodnik użytkownika, który ułatwia rozpoczęcie pracy z produktem.


Podwozie robota UGV01 zapewnia interakcję z urządzeniem za pomocą komend popularnego formatu wymiany danych JSON, który umożliwia sterowanie ruchem robota, jego prędkością, kierunkiem i automatyzuje kolejność wykonywania przez niego zadań. Robot może pobierać komendy zarówno zdalnie przez aplikację webową, jak i przy bezpośredniej komunikacji UART.
Sterownik robota z wbudowanym układem ESP32 obsługuje sterowanie serwomechanizmami za pomocą sygnałów PWM, dzięki czemu umożliwia on swobodne dostosowanie parametrów, takich jak kąt obrotu czy prędkość. Zapewnia to możliwość konstruowania skomplikowanych ruchów i manipulacji robota.
Wbudowany sterownik z układem ESP32 umożliwia zdalne sterowanie robotem poprzez stworzenie własnego hotspotu WiFi. Dostęp do interfejsu webowego jest dostępny w przeglądarce internetowej pod adresem 192.168.4.1. Użytkownicy mogą kontrolować robota za pomocą przycisków kierunkowych i regulować prędkość, a także wysyłać polecenia w formacie JSON do zarządzania różnymi funkcjami.
Proces konfiguracji hotspotu WiFi i przyłączenia się do niego został szczegółowo opisany w przewodniku w dziale UGV01 Basic Use.

Dostęp do interfejsu aplikacji webowej uzyskuje się przy pomocy uruchomienia adresu URL 192.168.4.1 w przeglądarce internetowej.

Uwaga! Przed pierwszym użyciem produktu niezbędny jest zakup i samodzielny montaż trzech akumulatorów 18650. Kiedy podłączysz je po raz pierwszy, sprawdź, czy świeci dioda LED. Jeśli tak, to znaczy, że akumulatory są źle podłączone (plus do minusa i minus do plusa) i trzeba je umieścić odwrotnie, ponieważ ładowanie ich w złej konfiguracji jest niebezpieczne i może spowodować eksplozję.
| Podwozie - typ | gąsienicowe |
| Podwozie + napęd | Tak |
| Podwozie + sterownik | Tak |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Dane GPSR
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Seednew Limited 3/F, Building 6, Shanglilang Zhichuangyuan, Pingji Avenue, Nanwan Street, Longgang District, Shenzhen, 518115, China
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




