- Produkt wycofany
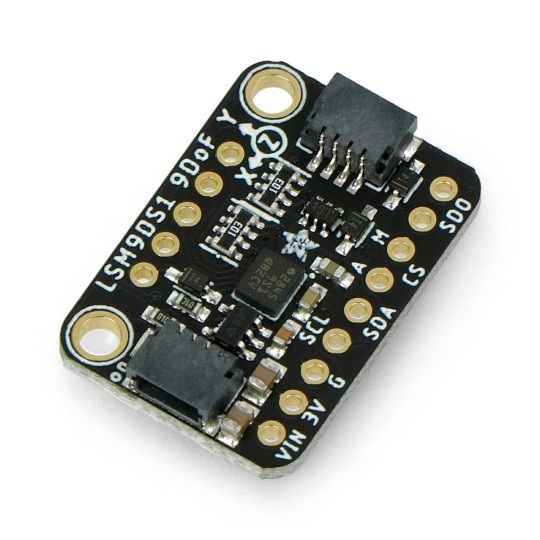






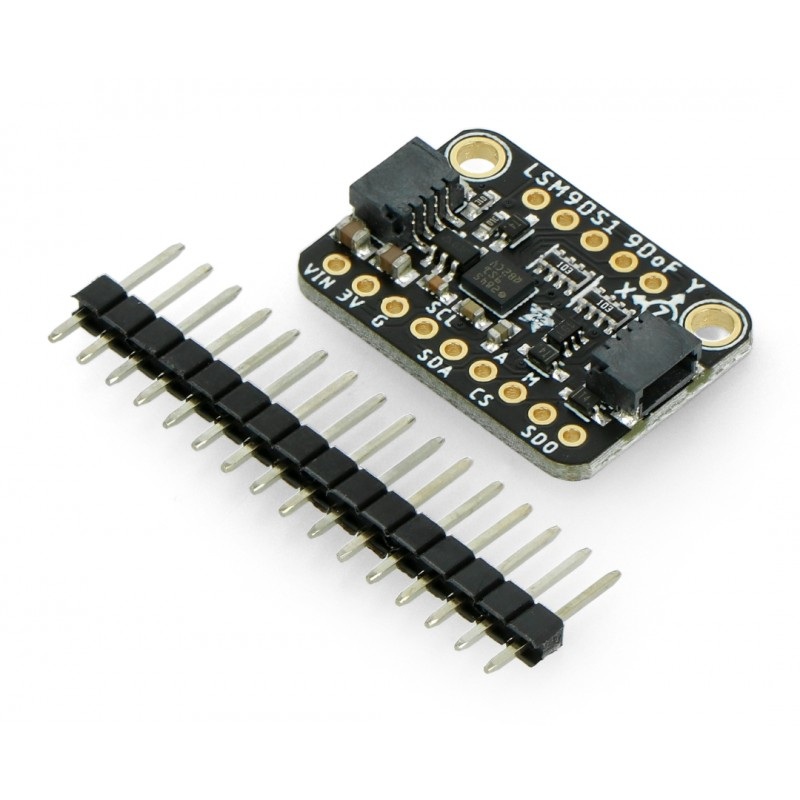
Czujnik 9DoF IMU LSM9DS1 wyposażony w 3-osiowy akcelerometr, 3-osiowy magnetometr oraz 3-osiowy żyroskop. Komunikuje się poprzez interfejs I2C lub SPI. Zasilany jest napięciem od 3 V do 5 V. Moduł wyposażony w dwa złącza STEMMA QT / Qwiic oraz złącza do wlutowania goldpinów 2,54 mm.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
Czujnik 9DoF IMU LSM9DS1 wyposażony w 3-osiowy akcelerometr, 3-osiowy magnetometr oraz 3-osiowy żyroskop. Komunikuje się poprzez interfejs I2C lub SPI. Zasilany jest napięciem od 3 V do 5 V. Moduł wyposażony w dwa złącza STEMMA QT / Qwiic oraz złącza do wlutowania goldpinów 2,54 mm.
|
Produkt kompatybilny z Arduino oraz Raspberry Pi Producent udostępnia przewodnik użytkownika, oraz bibliotekę dla Arduino oraz Raspberry Pi. |
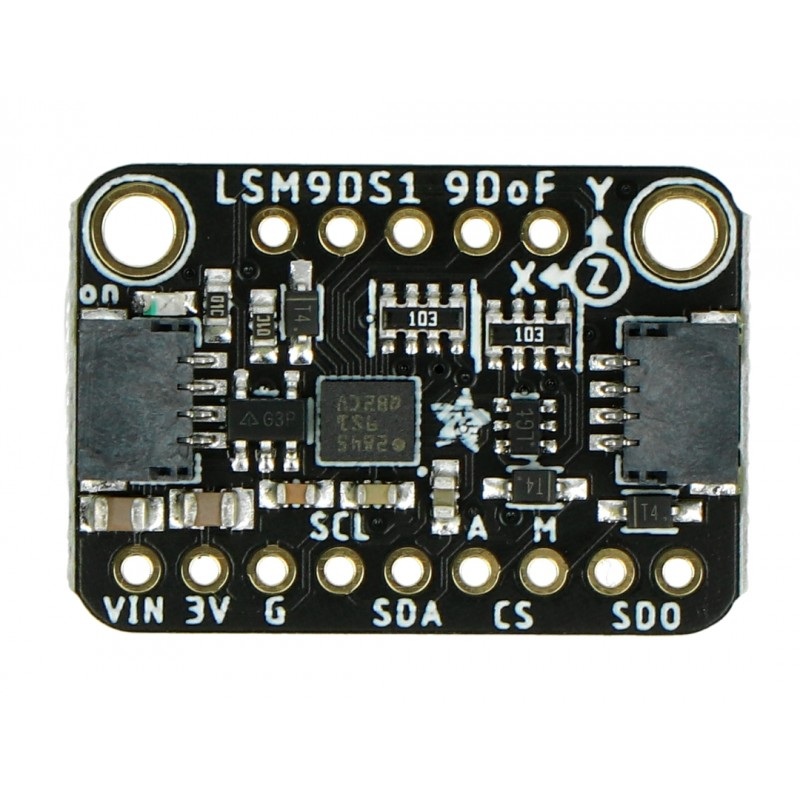
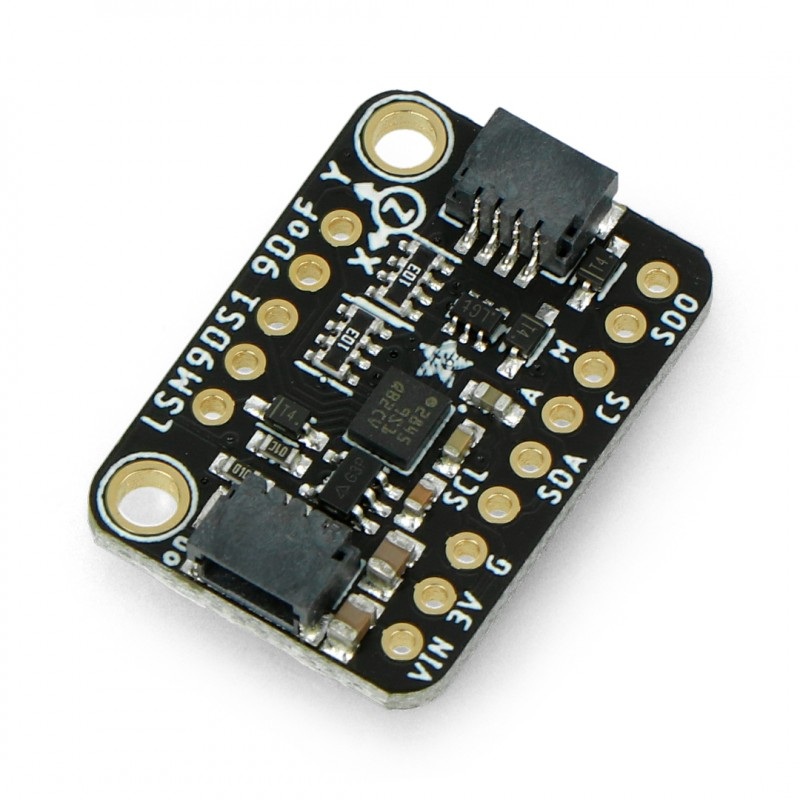
 Czujnik 9DoF IMU.
Czujnik 9DoF IMU.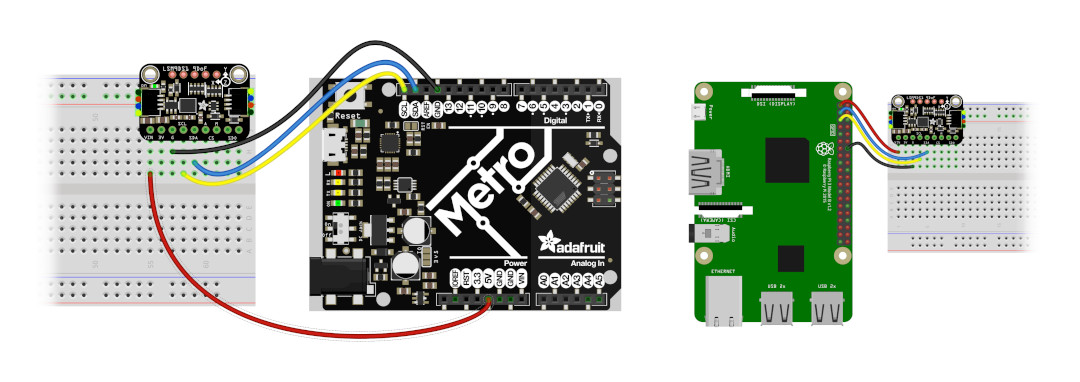
Przykład połączenia z Adafruit Metro oraz Raspberry Pi.
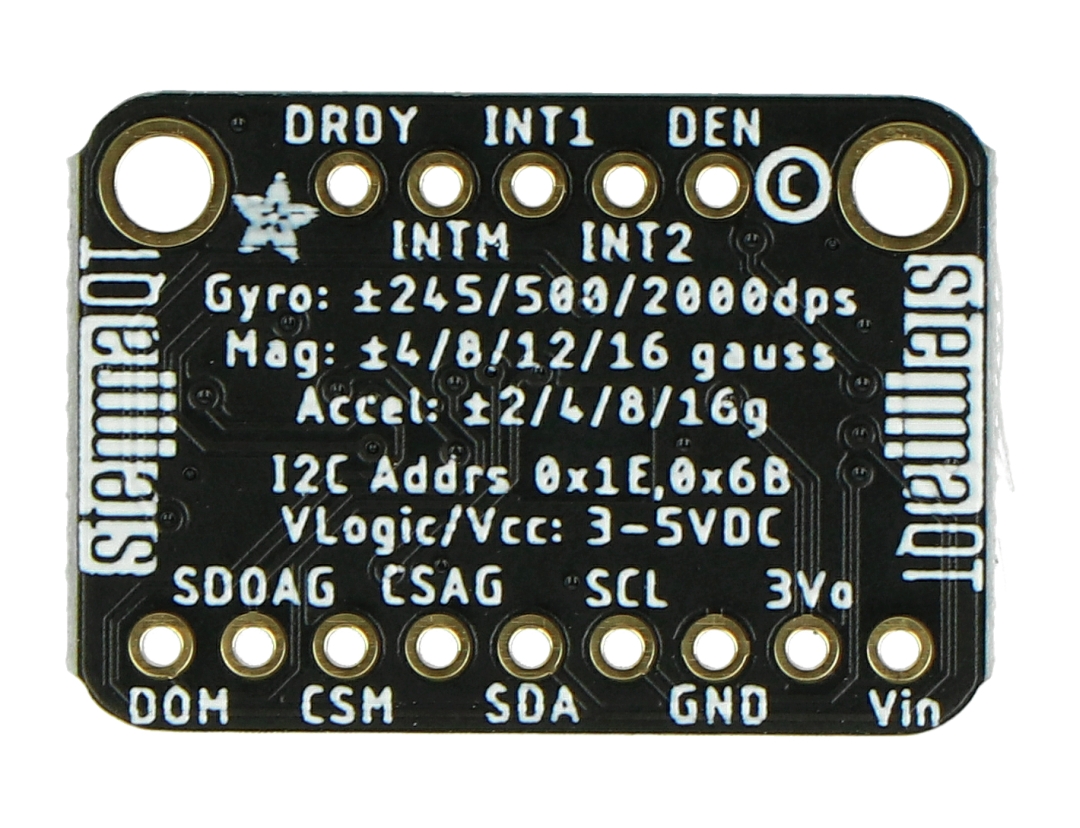
Moduł z układem LSM9DS1 komunikuje się poprzez interfejs I2C lub SPI. Zasilany jest napięciem od 3 V do 5 V. Do połączenia można wykorzystać dedykowane złącze STEMMA QT / Qwiic lub standardowe piny goldpin 2,54 mm.
| Pin | Opis |
|---|---|
| VIN | Napięcie zasilania od 3 V do 5 V. |
| 3Vo | Wyjście 3,3 V z regulatora, wydajność prądowa wynosi 100 mA. |
| GND | Masa układu. |
| SCL | Wyjście zegarowe magistrali I2C / SPI. |
| SDA | Wyjście danych magistrali I2C / SPI. |
| CSAG | Pin Chip Select akcelerometr + żyroskop. |
| SDOAG | Pin MISO akcelerometr + żyroskop. |
| SDOM/DOM | Pin MISO magnetometr. |
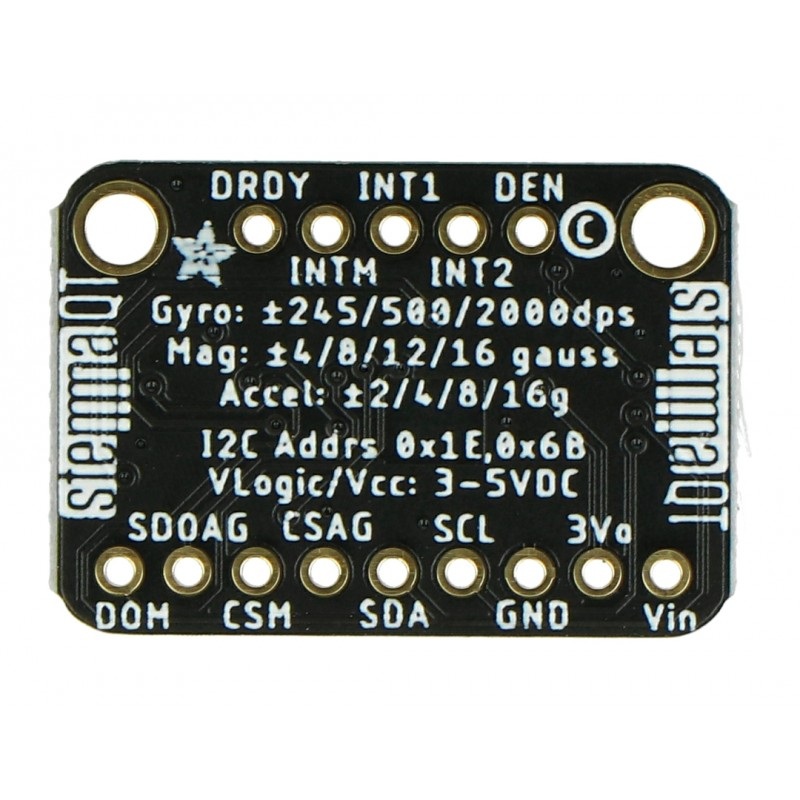
| DEN | Pin wykorzystywany do aktywacji lub dezaktywacji żyroskopu. |
| INT1 / INT2 | Zewnętrzne przerwania. |
| DRDY | Wspólny pin wyjścia danych dla akcelerometru / żyroskopu. |
| INTM | Zewnętrzne przerwanie z układu magnetometru. |

LSM9DS1 - 9DoF IMU - 3-osiowy akcelerometr, magnetometr i żyroskop I2C/SPI - Adafruit 4634.
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Dane GPSR
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Adafruit Industries LLC, 168 39TH ST STE 1905CC, Brooklyn, NY 11232
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]