












































































































































































































































































Flexible LED Filament - elastyczna taśma LED Noodle - 3V 130mm - Yellow
Indeks: DNG-28535
- Nowość!
- Darmowa dostawa
Flexible LED Filament - elastyczna taśma LED Noodle - 3V 130mm - Yellow

Obudowa do ekranu Raspberry Pi Touch Display 2 7'' - czarna



xTool P3 - wycinarka i grawerka laserowa CO2 80W - Versatile Bundle

xTool F2 Ultra UV - grawerka laserowa UV 5W z modułem Conveyor


Luxonis Oak-1 PoE - zestaw AI do rozpoznawania obrazu - Auto-Focus

Luxonis Oak-D-Pro - zestaw AI do rozpoznawania obrazu - Fixed-Focus

Filament Fiberlogy Easy PLA 1,75mm 2,5kg - White

Zestaw Electro-Fashion Discovery Pack - Kitronik 2715

Robobloq Coding Express - edukacyjny pociąg do nauki programowania

Siłownik elektryczny LA10 150N 40mm/s 12V - wysuw 30cm

Arduino Student Kit EN - zestaw do nauki elektroniki i programowania

Siłownik elektryczny CAR+ 1000N 10mm/s 12V - wysuw 15cm

Filament Fiberlogy PCTG+GF 1,75mm 0,75kg - Black
Produkty, których sprzedaż została zakończona.

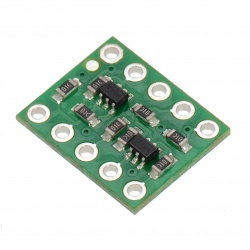
Sharp GP2Y0D810Z0F - cyfrowy czujnik odległości 10cm - Pololu 1135
Cyfrowy czujnik odległości Sharp GP2Y0D810Z0F wykrywający obiekty w odległości do 10 cm.
Stacja lutownicza WEP 937D+ - 75W
Grotowa stacja lutownicza WEP 937D+ o mocy 75 W z płynnie regulowaną temperaturą w zakresie: od 200 °C do 480 °C. P osiada czytelny wyświetlacz LED pokazujący zadaną...

Slider Rail Kit - slider dla Dobot Magician - 1m
Slider przeznaczony do robotów z serii Dobot Magician o długości 1 metra. Pozwala rozszerzyć zasięg ramienia . Umożliwia wykonywanie projektów zajmujących większą...
DFRobot FireBeetle ATmega328P - BLE4.1
Płytka umożliwia rozbudowanie Arduino o moduł Bluetooth . Wyposażona została w procesor ATmega328P oraz moduł Bluetooth BLE 4.1. Oferuje funkcje podobne do serii Bluno, ale...
DFRobot FireBeetle LoRa 433MHz
Moduł FireBeetle kompatybilny z Arduino wyposażony w moduł LoRa SX127x 433 MHz z wbudowanym PA (Power Amplifier), sterowanie odbywa się za pomocą interfejsu SPI....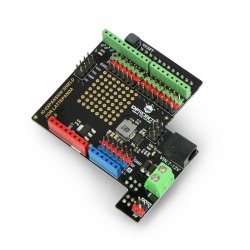
DFRobot Gravity - IO Expansion Shield dla LattePanda
Nakładka dla minikomputera LattePanda posiadająca wyprowadzenia Gravity I/O oraz wszystkie wyprowadzenia GPIO kompatybilne ze standardem Arduino i nie zakłóca pracy innych...
DFRobot Gravity - analogowy czujnik temperatury LM35
Analogowy czujnik LM35 kompatybilny z Arduino oraz Raspberry Pi. Zasilany napięciem od 3,3 V do 5 V . Potrafi dokonywać pomiaru temperatury w zakresie od 0 ℃ do 100 ℃....
DFRobot Gravity - dioda LED biała
Moduł z białą diodą LED wyposażony w złącze Gravity. Idealny do współpracy z platformą Arduino i własnych projektów elektronicznych. Dioda LED zaczyna świecić, kiedy pin...
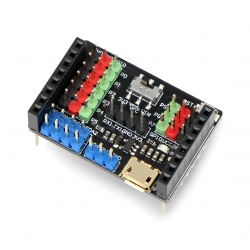
DFRobot Gravity Expansion Shield - płytka rozszerzeń dla kamery OpenMV Cam M7
Nakładka rozszerzająca możliwości kamery OpenMV Cam M7 o dodatkowe złącza umożliwiające podłączenie czujników i modułów z serii Gravity. Płytka została wyposażona w port...
Skaner 3D - Shining 3D EinScan SE V2
EinScan SE V2 to profesjonalne urządzenie służące do skanowania 3D fizycznych przedmiotów o maksymalnych wymiarach 700 x 700 x 700 mm . Skaner został wyposażony w obrotowy...
Cherokey - czterokołowy robot - DFRobot ROB0102
Platforma czterokołowego robota kompatybilnego z większością popularnych modułów Arduino. Cherokey posiada wbudowany sterownik silników L298P, który obsługuje dwa silniki o...
Gravity - analogowy czujnik zasolenia wody i gleby - DFRobot DFR0300-H
Urządzenie pozwala zmierzyć zasolenie wód i gleb poprzez zbadanie odwrotności oporu, jakim jest przewodność. Przewodność wody może odzwierciedlać poziom elektrolitów w niej...
Electro-Fashion - nić przewodząca 45m - Kitronik 2722
Szpula nici przewodzącej Kitronik Electro-Fashion o długości 45 m . Umożliwia tworzenie projektów związanych z inteligentną odzieżą. Nicią można szyć ręcznie lub przy użyciu...
Moduł Electro-Fashion z włącznikiem suwakowym - Kitronik 2709
Moduł z przełącznikiem suwakowym z serii Electro-Fashion do zastosowań w projektach związanych z inteligentną odzieżą. Umożliwia włączanie lub wyłączanie diod LED w projektach...
Electro-Fashion - zestaw do tworzenia inteligentnych ubrań dla BBC micro:bit - Kitronik 5607
Zestaw do tworzenia inteligentnych ubrań wyposażonych w oświetlenie LED. Kompatybilny z płytką rozwojową BBC micro:bit. Tworzone projekty nie wymagają lutowania, cały zestaw...
Centralka Gateway ZigBee ZGL2 Tuya Smart Life
Inteligentne i wielofunkcyjne urządzenie Gateway ZigBee ZGL2 w kolorze białym . Zasilane jest napięciem 5 V , pobór prądu wynosi 1 A . Gateway ZigBee jest centrum...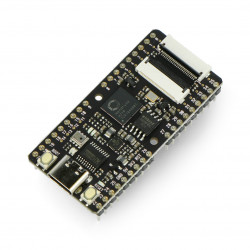
Płytka rozwojowa Maix Bit AI RISC-V K210 - IOT AI - DFRobot DFR0639
Płytka rozwojowa Maix Bit AI wyposażona w układ K210 z dwurdzeniowym procesorem RISC-V 64 bit, 400 Mhz posiadającym niezależny FPU i 8 MB pamięci SRAM. Na płytce znajduje...
Silnik 25Dx48L z przekładnią 4:4:1 12V 1700RPM - Pololu 3225
Silnik stworzony przez firmę Pololu z przekładnią 4 :4:1 . Moment obrotowy tego silnika to 0,8 kg*cm, a prędkość obrotowa wynosi 200 obr/min . Produkt zasilany...
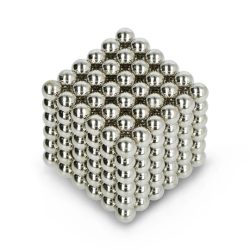
Magnes neodymowy okrągły Calamit N35/Ni 5x10mm - 10szt.
Magnes neodymowy okrągły ma wymiary 5 x 10 mm . Cechuje się bardzo dużą siłą przyciągania dzięki bardzo dużej gęstości energii. Magnesy trwałe wykorzystywane są w wielu...
Magnes neodymowy okrągły Calamit N35/Ni 10x4mm - 10 szt.
Magnes neodymowy okrągły ma wymiary 10 x 4 mm . Charakteryzuje się bardzo dużą siłą przyciągania. Magnesy trwałe wykorzystywane są w wielu przyrządach, narzędziach i...
Magnes neodymowy okrągły Calamit N35/Ni 6x3,6mm - 10szt.
Zestaw 10 sztuk magnesów neodymowych okrągłych o wymiarach 6 x 3,6 mm . Charakteryzują się bardzo dużą siłą przyciągania. Magnesy trwałe wykorzystywane są w wielu...
Magnes neodymowy okrągły Calamit N35/Ni 3x4mm - 10szt.
Zestaw 10 sztuk magnesów neodymowych okrągłych o średnicy 3 mm i długości 4 mm . Cechuje je duża siła przyciągania. Magnesy trwałe wykorzystywane są w wielu przyrządach,...Zobacz również