
































































































































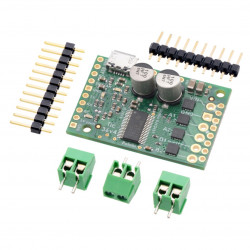





































































































































































































































































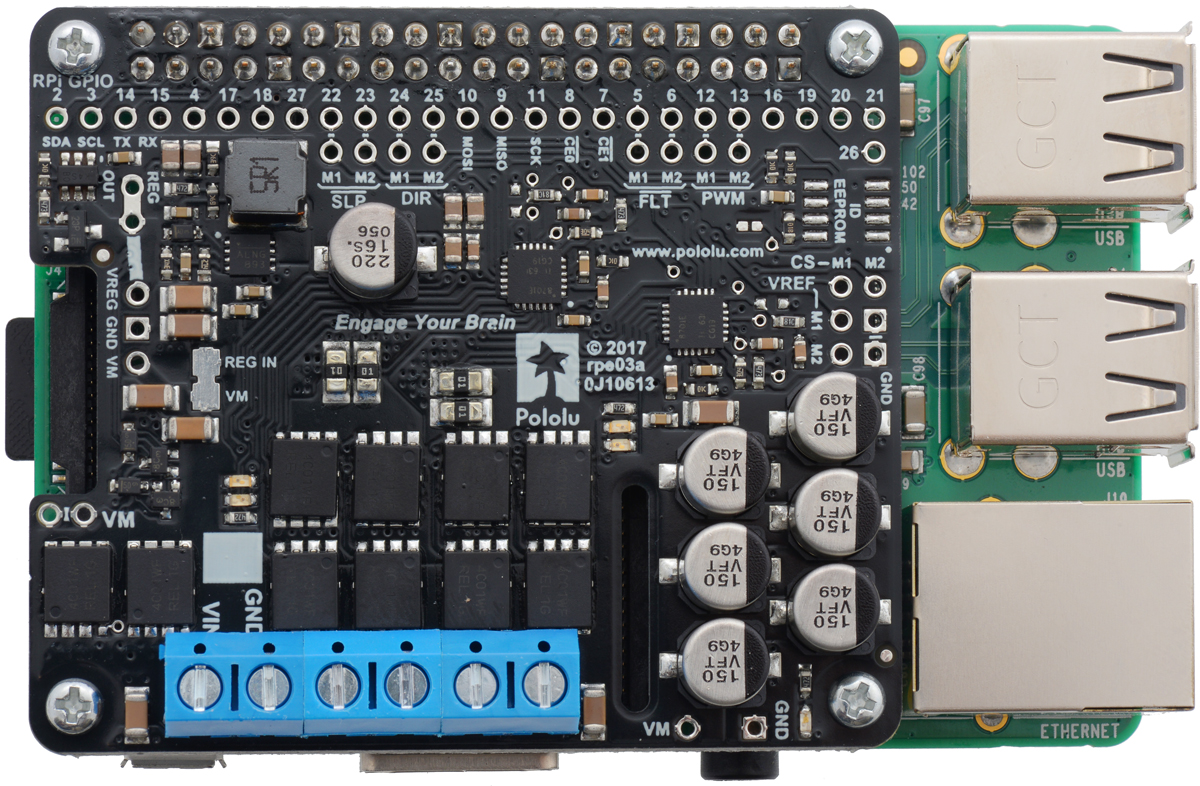
Nakładka z dwukanałowym sterownikiem silników pracująca z napięciami od 6,5 V do 36 V i prądem do 18 A na kanał (maks. 50 A). Układ można połączyć bezpośrednio ze złączami GPIO minikomputera Raspberry Pi 3, 2, B+ oraz A+.
Nakładka z dwukanałowym sterownikiem silników pracująca z napięciami od 6,5 V do 36 V i prądem do 18 A na kanał (maks. 50 A). Układ można połączyć bezpośrednio ze złączami GPIO minikomputera Raspberry Pi 3, 2, B+ oraz A+. Prędkość obrotową można kontrolować przy pomocy sygnału PWM.
|
W zestawie znajdują się: moduł, złącza śrubowe, listwa goldpin, śrubki oraz dystanse do samodzielnego montażu. |

W połączeniu z Raspberry Pi, przy wykorzystaniu specjalnie przygotowanej biblioteki można w prosty sposób kontrolować prędkość i kierunek obrotów dwóch silników prądu stałego. Kształt i wyprowadzenia płytki pozwalają na bezpośrednie połączenie z minikomputerem. Układ wykorzystuje 40-pinowe złącze GPIO.

Przedmiotem sprzedaży jest nakładka ze sterownikiem silników, minikomputer Raspberry Pi można nabyć osobno.
|
Produkt kompatybilny z Raspberry Pi Producent udostępnia bibliotekę języka Python dla użytkowników Raspberry Pi. |
Zasilanie silników zostało oddzielone od Raspberry Pi. Napięcie z zakresu od 6,5 V do 36 V należy podłączyć do wyprowadzeń VIN i GND. Zasilanie części logicznej 3,3 V pobierane jest z minikomputera.
Poniższa tabela przedstawia, które piny Raspberry Pi są wykorzystywane przez sterownik silników:
|
Pin RPi GPIO |
Pin sterownika |
Opis |
|---|---|---|
| 5 | Motor 1 FLT |
Pin statusowy. Domyślnie w stanie wysokim. Gdy zostanie wykryty błąd sterownika, przechodzi w stan niski. |
| 6 | Motor 2 FLT |
Pin statusowy. Domyślnie w stanie wysokim. Gdy zostanie wykryty błąd sterownika, przechodzi w stan niski. |
| 12 | Motor 1 PWM |
Wejście PWM do sterowania prędkością obrotową silnika. Maksymalna częstotliwość PWM wynosi 100 kHz. |
| 13 | Motor 2 PWM |
Wejście PWM do sterowania prędkością obrotową silnika. Maksymalna częstotliwość PWM wynosi 100 kHz. |
| 22 | Motor 1 SLP |
Domyślnie w stanie niskim, oznacza odłączone wyjścia silników. W celu uruchomienia sterownika, należy podać stan wysoki. |
| 23 | Motor 2 SLP | Domyślnie w stanie niskim, oznacza odłączone wyjścia silników. W celu uruchomienia sterownika, należy podać stan wysoki. |
| 24 | Motor 1 DIR |
Pin wyboru kierunku obrotów. W stanie niskim prąd płynie z wyjścia A do B. W stanie wysokim - z B do A. |
| 25 | Motor 2 DIR | Pin wyboru kierunku obrotów. W stanie niskim prąd płynie z wyjścia A do B. W stanie wysokim - z B do A. |
Tabela przedstawia tryby pracy w zależności od wejść:
| SLP | DIR | PWM | MxA | MxB | Tryb pracy |
|---|---|---|---|---|---|
| 1 | 0 | PWM | PWM (H/L) | L | Obroty w przód przy prędkości określonej PWM %. |
| 1 | 1 | PWM | L | PWM (H/L) | Obroty w tył przy prędkości określonej PWM %. |
| 1 | x | 0 | L |
L |
Hamowanie (wyjścia podłączone do masy). |
| 0 | x | x | Z | Z | Wyłączone wyjścia. |
|
Sterownik nie posiada funkcji automatycznego wyłączenia po przekroczeniu dopuszczalnej temperatury. |
Przydatne linki |
| Napięcie zasil. od | 6.5 V |
| Napięcie zasil. do | 36 V |
| Wydajność prąd | 22.0 A |
| Ilość kanałów | 2 |
| Szerokość opakowania | 8 cm |
| Wysokość opakowania | 1 cm |
| Głębokość opakowania | 12.5 cm |
| Masa opakowania | 0.034 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
















