












































































































































































































































































- Produkt wycofany
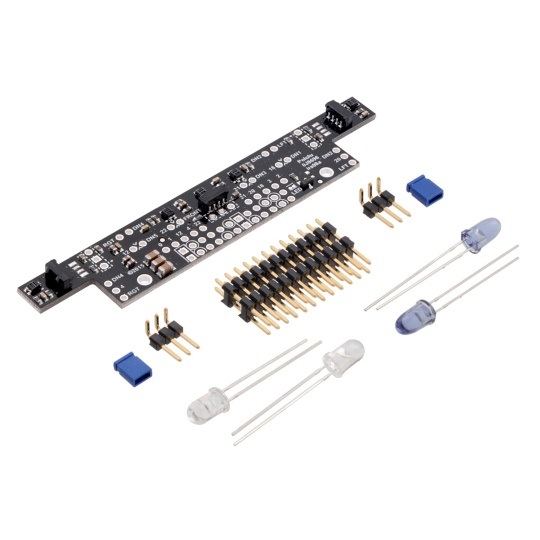
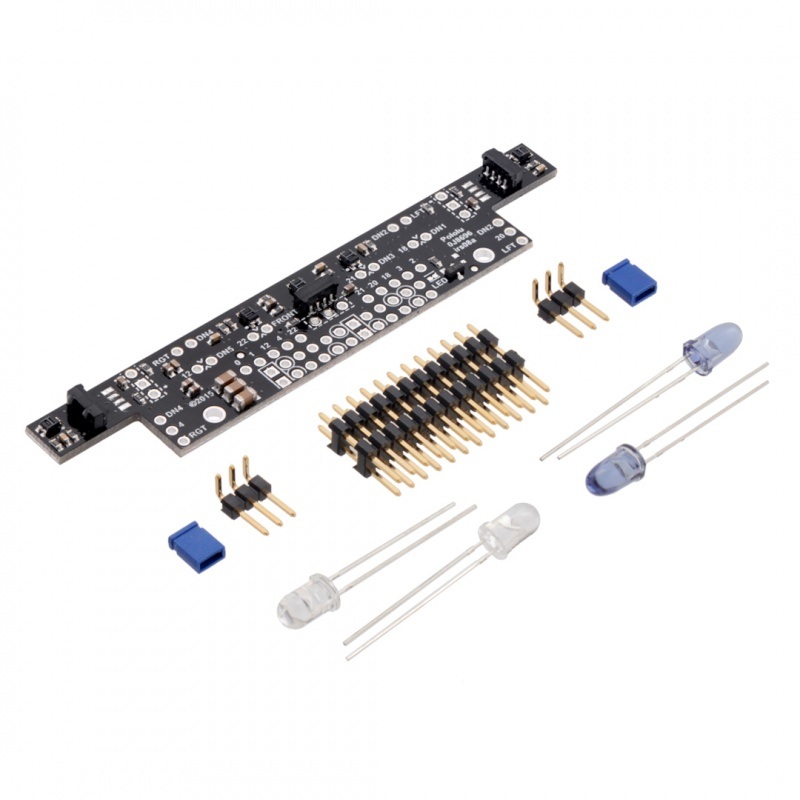





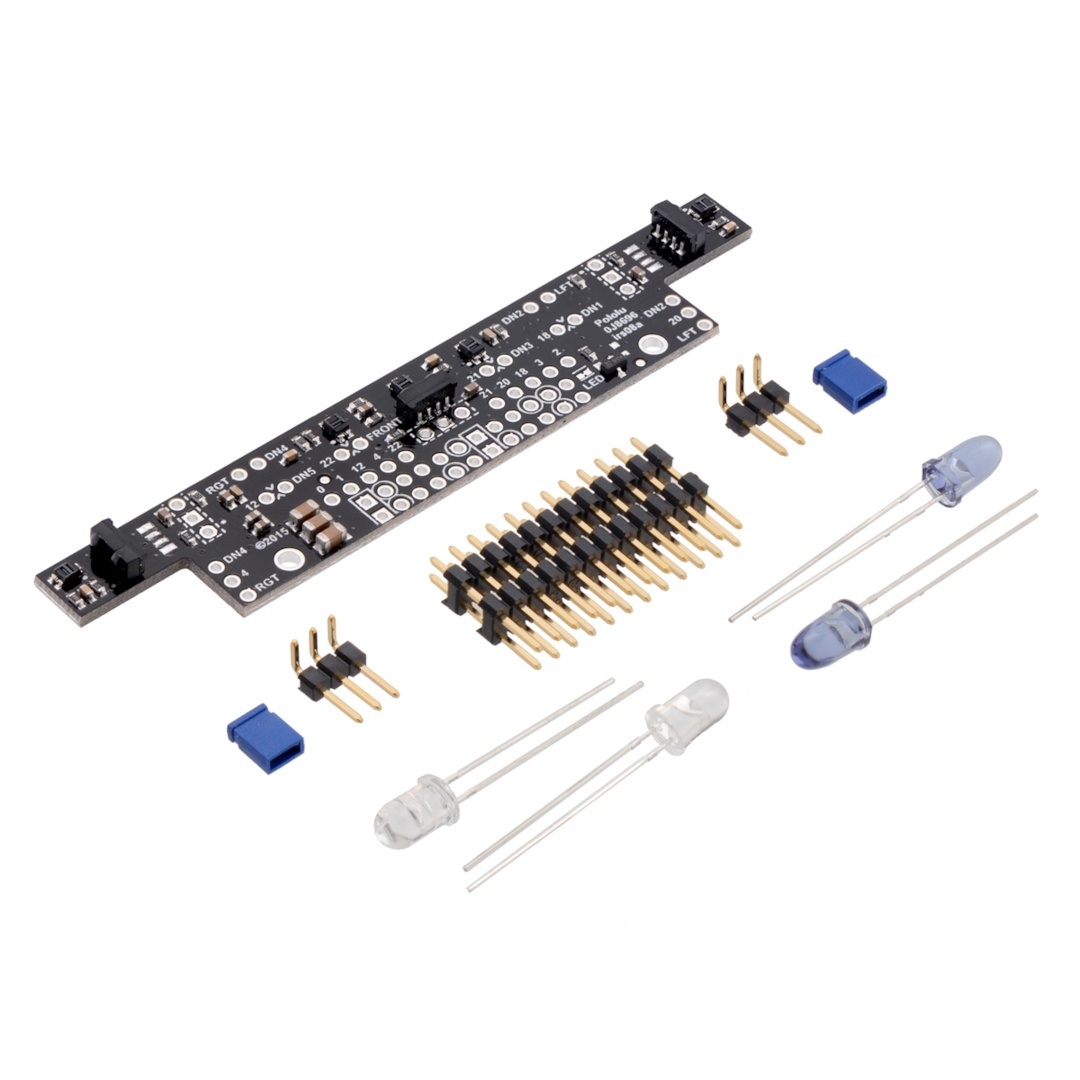
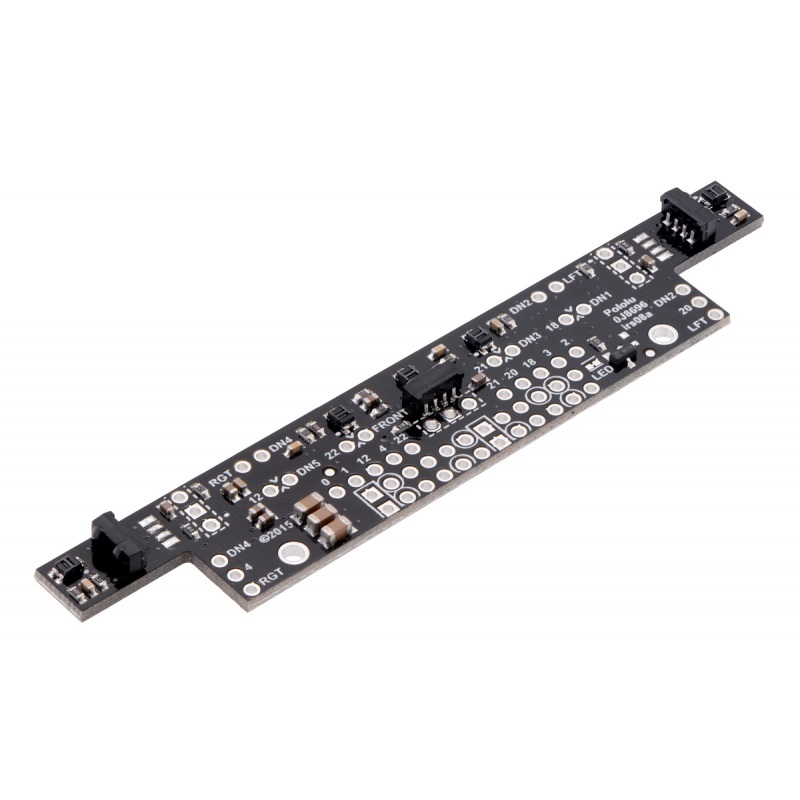
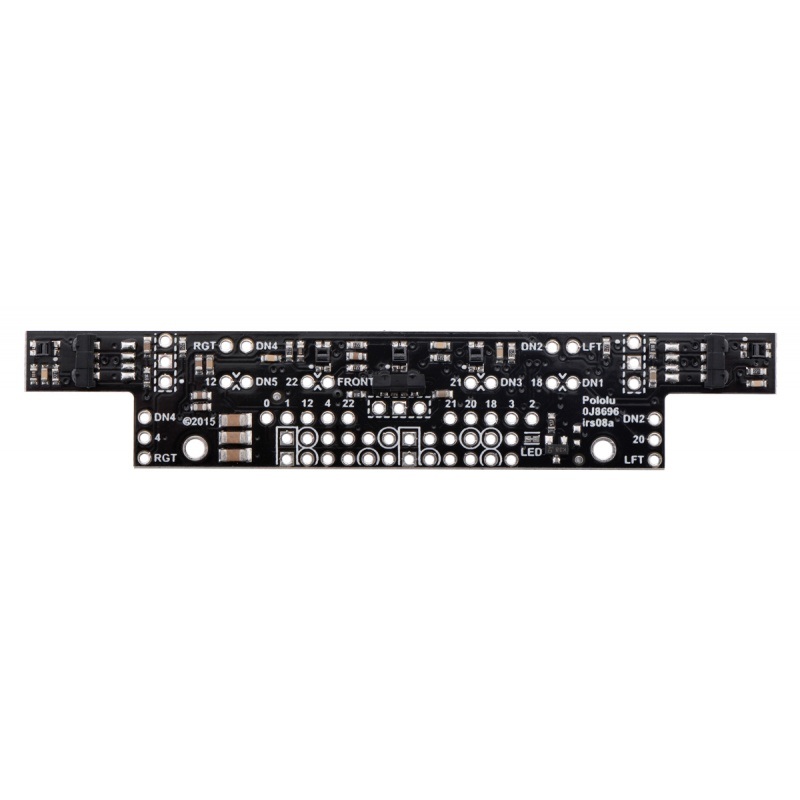
Płytka wyposażona w matrycę czujników dla robota Pololu Zumo 32u4. Na płytce znajduje się 5 czujników odbiciowych Sharp GP2S60 oznaczonych jako DOWN1, DOWN2, DOWN3, DOWN4, DOWN5 oraz 3 ultradźwiękowe czujniki odległości Vishay TSSP77038, oznaczone zostały na płytce jako LEFT, RIFGT, DOWN. Czujniki odbiciowe mogą służyć do wykrywania linii, po której robot ma się poruszać lub wykrywania krawędzi ringu, natomiast czujniki odległości pozwolą robotowi wykryć zbliżającą się przeszkodę.

Elementy wchodzące w skład robota.
Platforma robota walczącego Pololu Zumo 32u4 klasy minisumo, spełnia wszystkie wymogi walk robotów, czyli posiada wymiary 10 x 10 cm i masę 500 g. Robot wyposażony został w dwa silniki prądu stałego, pług do walki oraz płytę główną z mikrokontrolerem ATmega32u4 znanym z Pololu A-Star. Zasilany jest on czterema bateriami AA i programowany przez złącza microUSB, z wykorzystaniem środowiska Arduino IDE.
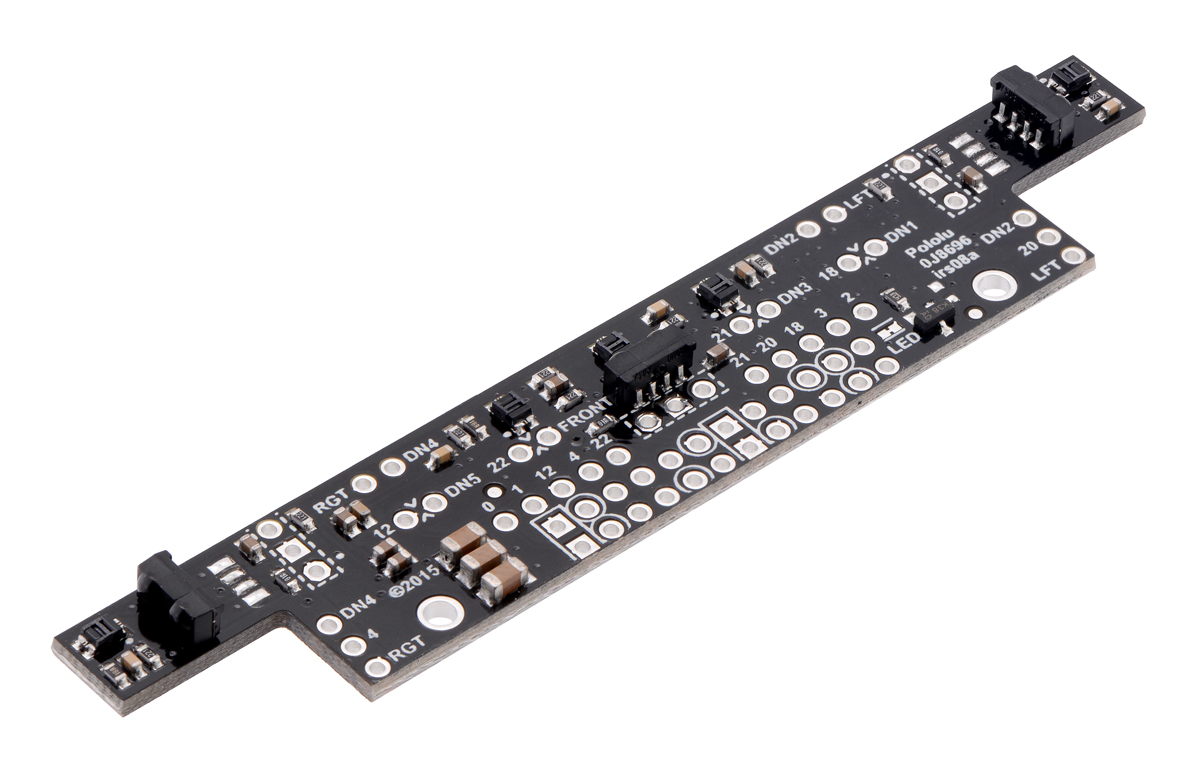 Matryca czujników do Zumo 32u4.
Matryca czujników do Zumo 32u4. Robot Zumo 32u4 z zamontowaną listwą czujników.
Robot Zumo 32u4 z zamontowaną listwą czujników.Wartości z czujników odczytywane są poprzez pomiar czasu rozładowania kondensatora. Takie rozwiązanie eliminuje konieczność wykorzystania przetwornika analogowo-cyfrowego.
Typowa sekwencja odczytu wartości czujników:
1. Włączenie diod IR ( jeśli zostały wcześniej wyłączone)
2. Ustawienie wyprowadzeń I/O mikrontrolera jako wyjścia oraz wygenerowanie stanu wysokiego.
3. Odczekanie kilku mikrosekund dla naładowania kondensatora 1nF
4. Ustawienie wyprowadzeń I/O jako wejścia (stan wysokiej impedancji)
5. Pomiar czasu rozładowania kondensatora poprzez czekanie aż linie I/O przejdą w stan niski.
6. Wyłączenie diod IR (opcjonalne).
Powyższe kroki powinny być wykonywane równolegle dla wszystkich czujników.
Biblioteka Arduino dla Zumo zawiera funkcje pozwalające w prosty sposób odczytywać wartości z czujników oraz kontrolować nadajniki podczerwieni. Dzięki temu użytkownik nie musi samodzielnie implementować w programie powyższych sekwencji.
Podczas, gdy natężenie światła odbitego jest duże (barwa jasna), czas rozładowania kondensatora będzie wynosił kilka mikrosekund, przy braku odbicia wzrośnie do kilku milisekund. Sensowne wartości można mierzyć w odstępach 1 ms - jeśli odróżniany będzie tylko kolor czarny od białego bez barw pośrednich, co jest wystarczające w przypadku minisumo i line followerów. Pozwala to na próbkowanie z częstotliwością 1 kHz wszystkich czujników. Jeśli niższa częstotliwość jest satysfakcjonująca, można ograniczyć zużycie prądu poprzez wyłączenie nadajników podczerwieni. Przykładowo dla 100 Hz diody nadawcze mogą być wyłączone przez 90% czasu, obniżając w ten sposób średni pobór prądu z 40 mA do 4 mA.
Przydatne linki |
| Szerokość opakowania | 12 cm |
| Wysokość opakowania | 15 cm |
| Głębokość opakowania | 0.5 cm |
| Masa opakowania | 0.012 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin