

















































































































































































































































































































































































































 Przetwornik analogowo-cyfrowy (ADC) jest popularny akcesorium dla Raspberry Pi. Obecnie wiele tańszych mikrokontrolerów ma już wbudowany konwerter, więc ten 8-kanałowy przetwornik został stworzony w oparciu o STM32F030, który jest ekonomicznym, energooszczędnym mikrokontrolerem ARM Cortex M0. Płytka posiada 8 kanałów ADC oraz zintegrowane 4 złącza analogowe Grove, dzięki czemu można przy jej pomocy korzystać również z analogowych modułów Grove.
Przetwornik analogowo-cyfrowy (ADC) jest popularny akcesorium dla Raspberry Pi. Obecnie wiele tańszych mikrokontrolerów ma już wbudowany konwerter, więc ten 8-kanałowy przetwornik został stworzony w oparciu o STM32F030, który jest ekonomicznym, energooszczędnym mikrokontrolerem ARM Cortex M0. Płytka posiada 8 kanałów ADC oraz zintegrowane 4 złącza analogowe Grove, dzięki czemu można przy jej pomocy korzystać również z analogowych modułów Grove.
|
Kup Teraz |
Właściwości
- Jednostka obliczeniowa CRC
- 5-kanałowy kontroler DMA (bezpośredni dostęp do pamięci)
- Kalendarz RTC z alarmem oraz okresowym budzeniem Stop / Standby
- Timery
- Timer z zaawansowaną kontrolą
- Ogólne timery oraz podstawowe timery
- Niezależny time oraz watchdog timer
- SysTick timer
- Zegar czasu rzeczywistego (RTC)
- Debugowanie przewodu szeregowego (SWD)
Specyfikacje
| Cecha | Wartość |
|---|---|
| Napięcie robocze | 3.3 V |
| Rozdzielczość ADC | 12 bit |
|
Maksymalna częstotliwość sygnału zegarowego |
48 MHz |
| Wielkość pamięci odczytu | 16 kB |
| Wielkość pamięci RAM | 4 kB |
| Szerokość magistrali danych | 32 bit |
| Temperatura robocza | od -40°C do 85℃ |
| Interfejs komunikacji | I2C |
| Adres I2C | 0x04 (domyślny) |
| Wymiary | 65 x 55 x 18 mm |
| Waga | 25.9 g |
| Wymiary opakowania | 140 x 75 x 25 mm |
| Waga brutto | 45 g |
Typowe zastosowania
- Pomiar temperatury
- Dobra konsumpcyjne
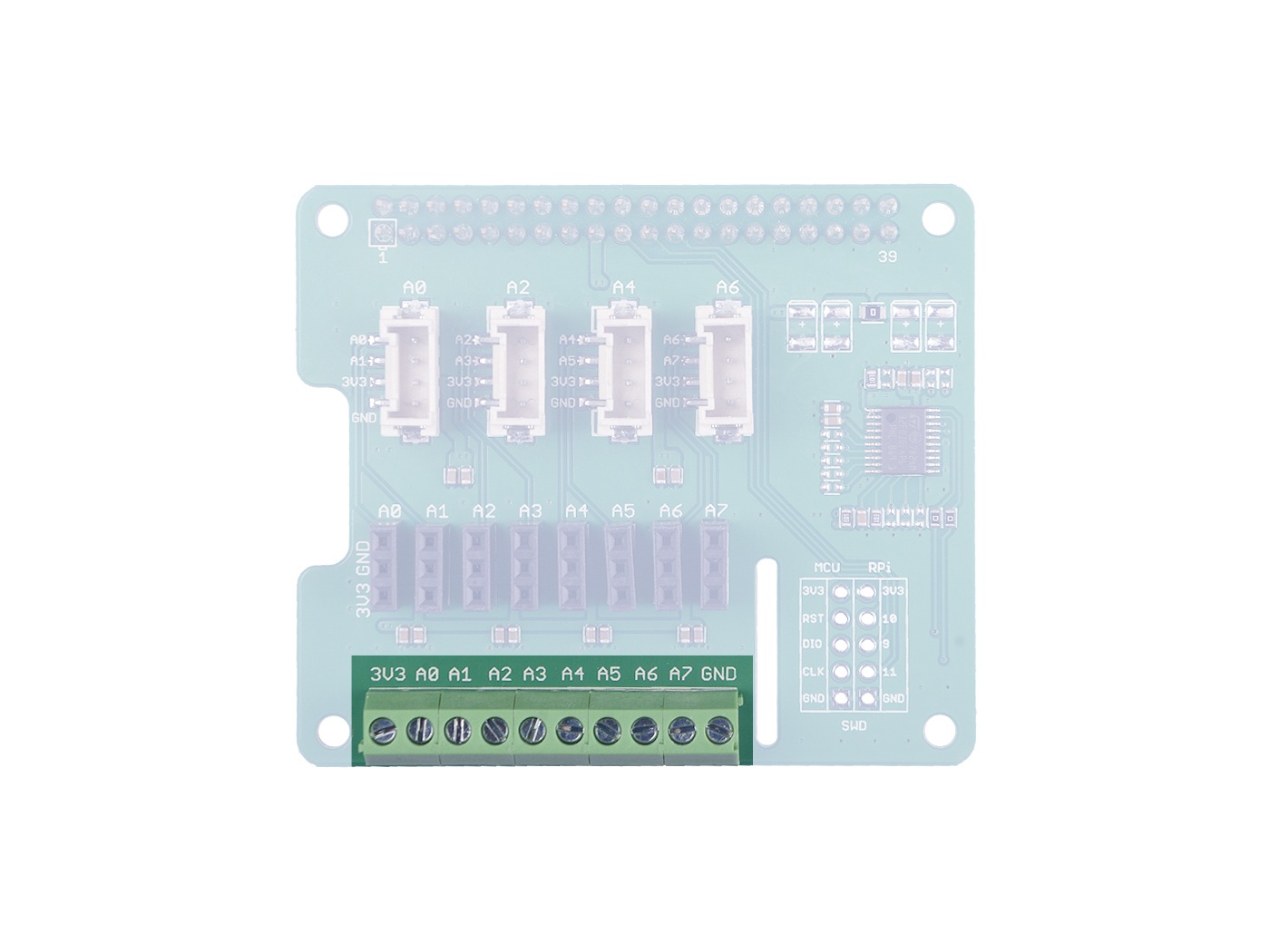
Przegląd sprzętu
Rozkład wyprowadzeń
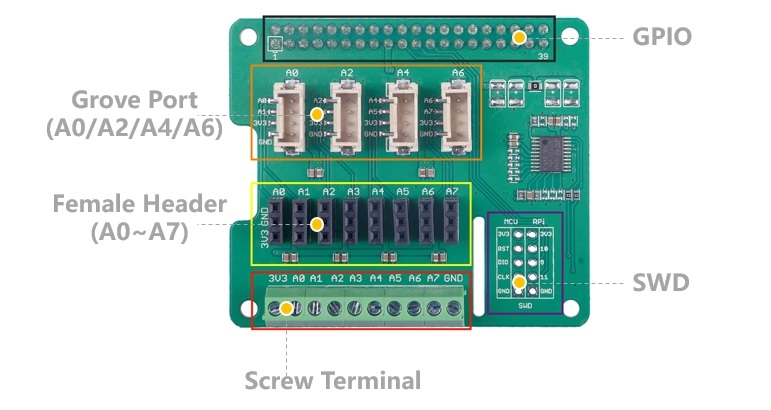 GPIO
GPIO
Taki sam rozkład jak na Raspberry Pi.
SWD
Portu SWD używamy do nagrania oprogramowania układowego na tej płytce. Dodatkowo w tej sekcji możesz zobaczyć pin 9 / pin 10 / pin 11. Te trzy piny nie są używane przez żaden port Grove, możesz ich używać bez obaw o spięcie pinów.
Grove Port Analogowy
Jak wiadomo, na Raspberry Pi nie ma konwertera ADC, więc ta płytka ADC na bazie STM32 pozwala na pracę czujników analogowych z Raspberry Pi.
Na płytce są 4 gniazda analogowe Grove, więc możesz podłączać moduły Grove bezpośrednio za pomocą Grove - Uniwersalny Przewód Taśmowy 5 cm 4 piny.
Czujnik analogowy wprowadza napięcie analogowe do 12-bitowego przetwornika ADC. Po przekształceniu danych analogowych na cyfrowe, przetwornik wprowadza je do Raspberry Pi poprzez interfejs I2C.
 Żeńskie złącza pinowe
Żeńskie złącza pinowe
Działają podobnie jak porty analogowe Grove, tylko zamiast Grove - Uniwersalny Przewód Taśmowy 5 cm 4 piny wykorzystują zestaw przewodów Breadboard Jumper Wire Pack.
8 analogowych portów przyłączeniowych, A0 ~ A7.
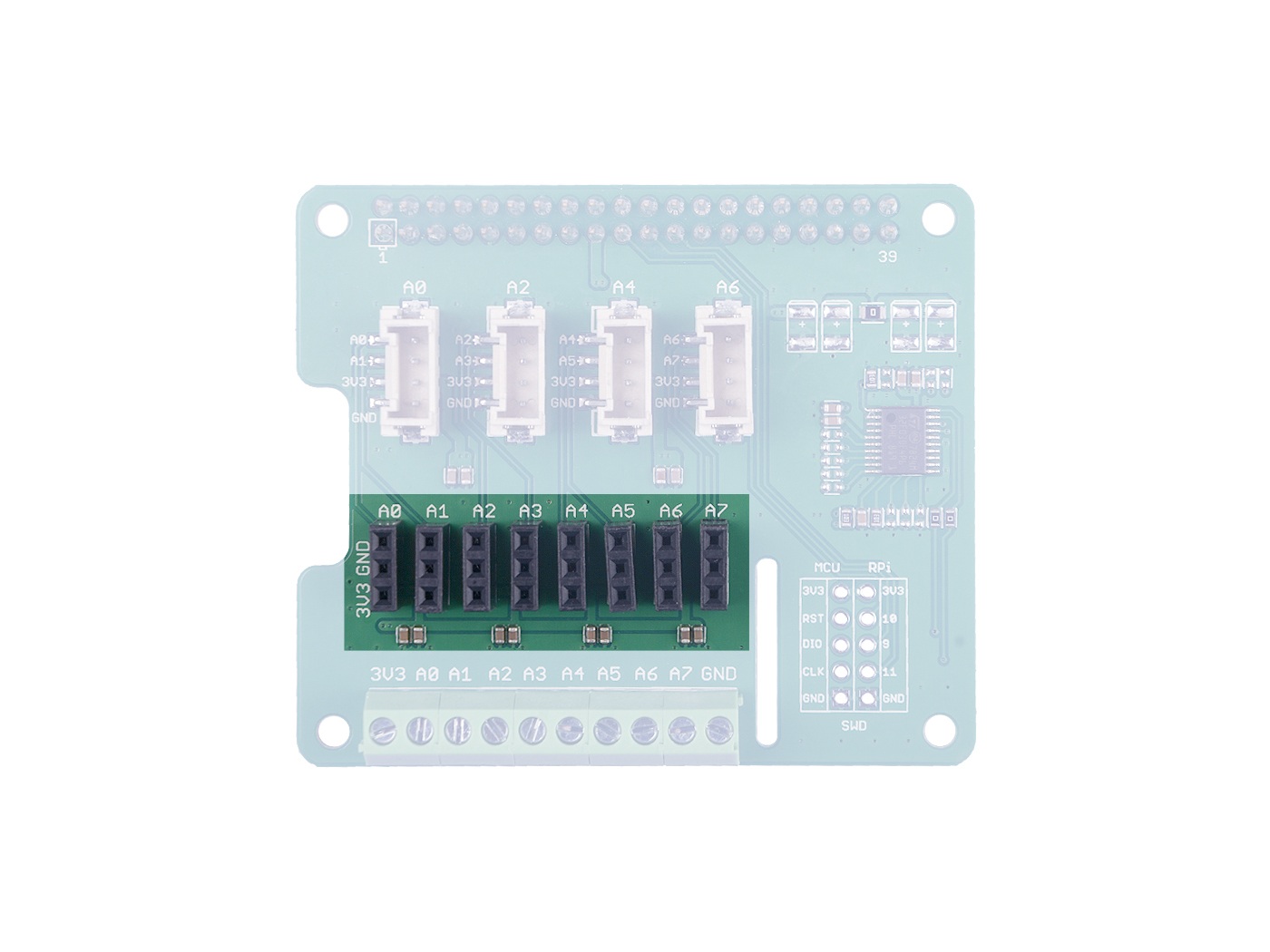 Złącza śrubowe
Złącza śrubowe
Podobne do powyższych, mają tylko inną metodę podłączenia. Ta grupa zawiera piny analogowe A0 ~ A7, Vcc oraz GND.
Jak zacząć?
Sprzęt
Wymagane materiały
| Raspberry Pi |
8-kanałowy 12-bitowy przetwornik analogowo-cyfrowy dla Raspberry Pi(STM32F030) |
|---|---|
 |
|
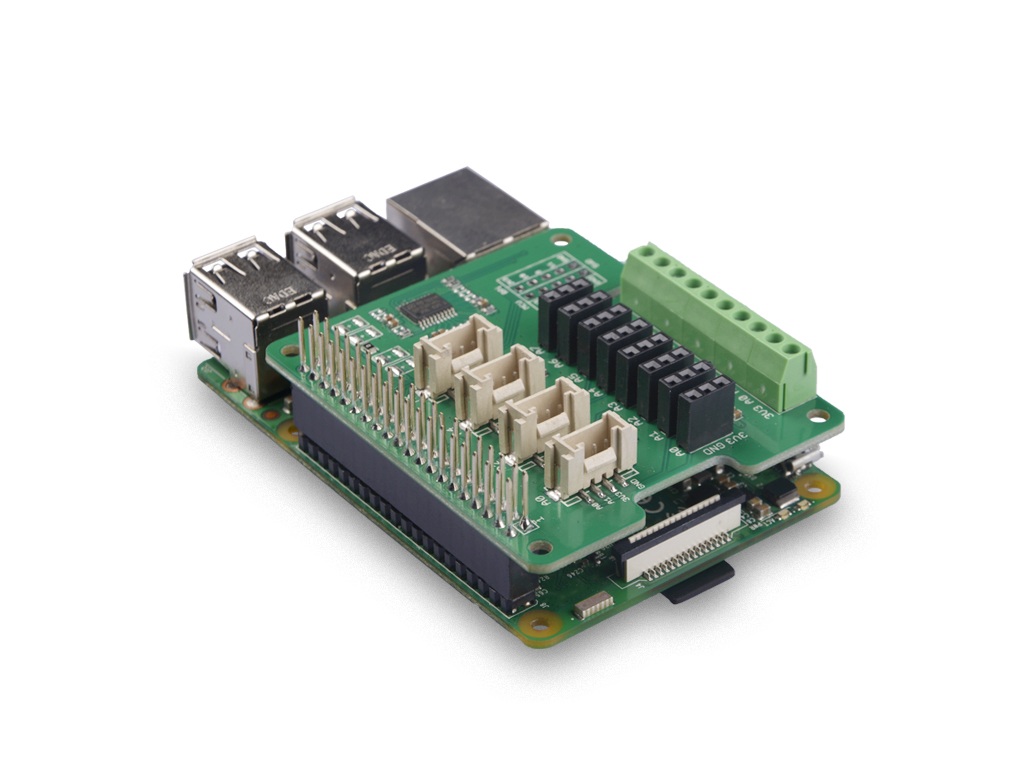
- Krok 1. Wprowadź przetwornik do Raspberry Pi.
- Krok 2. Podłącz Raspberry Pi do komputera przez kabel USB.
Oprogramowanie
- Krok 1. Pobierz plik źródłowy, klonując bibliotekę grove.py.
cd ~ git clone https://github.com/Seeed-Studio/grove.py
- Krok 2. Zainstaluj bibliotekę grove.py
cd grove.py # Python2 sudo pip install . # Python3 sudo pip3 install .
- Krok 3. Wykonaj poniższe komendy, aby uruchomić kod.
cd grove.py/grove python adc_8chan_12bit.py
Poniżej znajduje się kod adc_8chan_12bit.py.
import time
from grove.i2c import Bus
ADC_DEFAULT_IIC_ADDR = 0X04
ADC_CHAN_NUM = 8
REG_RAW_DATA_START = 0X10
REG_VOL_START = 0X20
REG_RTO_START = 0X30
REG_SET_ADDR = 0XC0
class Pi_hat_adc():
def __init__(self,bus_num=1,addr=ADC_DEFAULT_IIC_ADDR):
self.bus=Bus(bus_num)
self.addr=addr
#get all raw adc data,THe max value is 4095,cause it is 12 Bit ADC
def get_all_adc_raw_data(self):
array = []
for i in range(ADC_CHAN_NUM):
data=self.bus.read_i2c_block_data(self.addr,REG_RAW_DATA_START+i,2)
val=data[1]<<8|data[0]
array.append(val)
return array
def get_nchan_adc_raw_data(self,n):
data=self.bus.read_i2c_block_data(self.addr,REG_RAW_DATA_START+n,2)
val =data[1]<<8|data[0]
return val
#get all data with unit mv.
def get_all_vol_milli_data(self):
array = []
for i in range(ADC_CHAN_NUM):
data=self.bus.read_i2c_block_data(self.addr,REG_VOL_START+i,2)
val=data[1]<<8|data[0]
array.append(val)
return array
def get_nchan_vol_milli_data(self,n):
data=self.bus.read_i2c_block_data(self.addr,REG_VOL_START+n,2)
val =data[1]<<8|data[0]
return val
#get all data ratio,unit is 0.1%
def get_all_ratio_0_1_data(self):
array = []
for i in range(ADC_CHAN_NUM):
data=self.bus.read_i2c_block_data(self.addr,REG_RTO_START+i,2)
val=data[1]<<8|data[0]
array.append(val)
return array
def get_nchan_ratio_0_1_data(self,n):
data=self.bus.read_i2c_block_data(self.addr,REG_RTO_START+n,2)
val =data[1]<<8|data[0]
return val
ADC = Pi_hat_adc()
def main():
raw_data=ADC.get_all_adc_raw_data()
vol_data=ADC.get_all_vol_milli_data()
ratio_data=ADC.get_all_ratio_0_1_data()
print("raw data for each channel:(1-8chan)(12 bit-max=4096):")
print(raw_data)
print("voltage for each channel:(unit:mv,max=3300mv):")
print(vol_data)
print ("ratio for each channel(unit 0.1%,max=100.0%):")
print(ratio_data)
print(" ")
print("NOTICE!!!:")
print("The default setting of ADC PIN is floating_input.")
print(" ")
if __name__ == '__main__':
main()
|
Sukces Jeśli wszystko wykonałeś pomyślnie, powinien wyświetlić się poniższy komunikat. |
pi@raspberrypi:~/grove.py/grove $ python adc_8chan_12bit.py raw data for each channel:(1-8chan)(12 bit-max=4096): [2177, 2098, 2064, 2038, 2127, 2066, 2172, 2145] voltage for each channel:(unit:mv,max=3300mv): [1599, 1741, 1668, 1658, 1644, 1787, 1694, 1677] ratio for each channel(unit 0.1%,max=100.0%): [521, 544, 514, 504, 500, 559, 524, 505] NOTICE!!!: The default setting of ADC PIN is floating_input.
Przykład
Weźmy Grove - Czujnik Dźwięku za przykład, aby zaprezentować, jak korzystać z tej płytki.
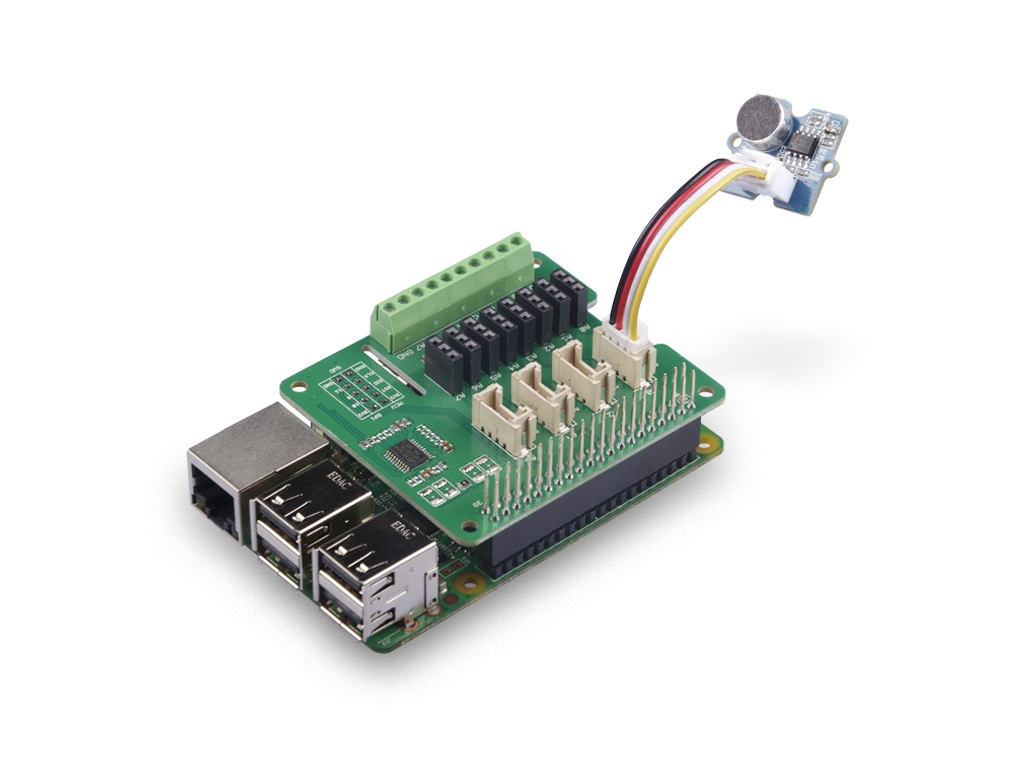
Podłączenie sprzętu
- Krok 1. Podłącz przetwornik do Raspberry Pi.
- Krok 2. Podłącz Grove - Czujnik dźwięku przez port A0 do przetwornika.
- Krok 3. Podłącz Raspberry Pi do komputera przez kabel USB.
Schemat połączeń sprzętu
 Wpisz następujące polecenie: ++python grove_sound_sensor.py 0++ w wierszu poleceń.
Wpisz następujące polecenie: ++python grove_sound_sensor.py 0++ w wierszu poleceń.
pi@raspberrypi:~/grove.py/grove $ python grove_sound_sensor.py 6 Detecting sound... Sound value: 433 Sound value: 342 Sound value: 443 Sound value: 300 Sound value: 632 Sound value: 258 Sound value: 591 Sound value: 267 Sound value: 871 ^CTraceback (most recent call last): File "grove_sound_sensor.py", line 67, inmain() File "grove_sound_sensor.py", line 64, in main time.sleep(.3) KeyboardInterrupt
Możesz opuścić program, wciskając Ctrl+C.