







































































































































































































































































































































































































Moduł z dwukanałowym sterownikiem silników MAX14870 pracujący z napięciami od 4,5 V do 36 V i prądem do 1,7 A na kanał (maks. 2,5 A). Układ można połączyć bezpośrednio ze złączami GPIO minikomputera Raspberry Pi B+, A+, 2, 3, 3+ oraz 4. Moduł do samodzielnego montażu.
|
W zestawie znajdują się: moduł, złącza śrubowe, listwa goldpin do samodzielnego montażu. W naszej ofercie znajdziesz również, zmontowany, gotowy do pracy układ. |
Moduł oparty na dwóch układach MAX14870 pozwala kontrolować silniki o napięciu zasilania do 36 V i ciągłym poborze prądu do 1,7 A. Sterownik wytrzymuje także kilkusekundowe skoki natężenia prądu do 2,5 A. Prędkość obrotową można kontrolować przy pomocy sygnału PWM.

W połączeniu z Raspberry Pi, przy wykorzystaniu specjalnie przygotowanej biblioteki można w prosty sposób kontrolować prędkość i kierunek obrotów dwóch silników prądu stałego. Kształt i wyprowadzenia płytki pozwalają na bezpośrednie połączenie z minikomputerem, tak jak przedstawiono na rysunkach powyżej. Układ wykorzystuje 40-pinowe złącze GPIO.
|
Produkt kompatybilny z Raspberry Pi Producent udostępnia bibliotekę języka Python dla użytkowników Raspberry Pi. |

Zasilanie silników zostało oddzielone od Raspberry Pi . Napięcie z zakresu od 4,5 V do 36 V należy podłączyć do wyprowadzeń VIN i GND. Zasilanie części logicznej 3,3 V pobierane jest z minikomputera.
Poniższa tabela przedstawia, które piny Raspberry Pi są wykorzystywane przez sterownik silników:
|
Pin RPi GPIO |
Pin sterownika |
Opis |
|---|---|---|
| 5 | EN |
Domyślnie w stanie niskim, oznacza odłączone wyjścia silników. W celu uruchomienia sterownika, należy podać stan wysoki. |
| 6 | FAULT |
Wyjście błędu. DOmyślnie w stanie wysokim. Sygnalizuje nadmierny prąd lub temperaturę. |
| 12 | Motor 1 PWM |
Wejście PWM do sterowania prędkością obrotową silnika. Maksymalna częstotliwość PWM wynosi 50 kHz. |
| 13 | Motor 2 PWM |
Wejście PWM do sterowania prędkością obrotową silnika. Maksymalna częstotliwość PWM wynosi 50 kHz. |
| 22 | Motor 1 DIR |
Pin wyboru kierunku obrotów. W stanie niskim prąd płynie z wyjścia A do B. W stanie wysokim - z B do A. |
| 25 | Motor 2 DIR | Pin wyboru kierunku obrotów. W stanie niskim prąd płynie z wyjścia A do B. W stanie wysokim - z B do A. |
Tabela przedstawia tryby pracy w zależności od wejść:
| EN | DIR | PWM | MxA | MxB | Tryb pracy |
|---|---|---|---|---|---|
| 0 | 0 | PWM | PWM (H/L) | L | Obroty w przód przy prędkości określonej PWM %. |
| 0 | 1 | PWM | L | PWM (H/L) | Obroty w tył przy prędkości określonej PWM %. |
| 1 | x | 0 | L |
L |
Hamowanie (wyjścia podłączone do masy). |
| 1 | x | x | Z | Z | Wyłączone wyjścia. |
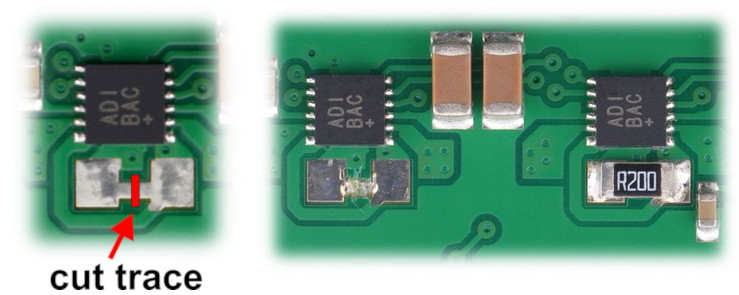
Układ MAX14870 posiada wejście SNS, które może służyć jako automatyczny ogranicznik prądu. Domyślnie jest podłączone do GND dla obu układów. Aby włączyć ograniczenie , należy najpierw przerwać ścieżkę między pinami rezystorów 1206. Następnie do tych wyprowadzeń należy podłączyć odpowiedni rezystor 1206.
Urządzenie umożliwia zasilanie samego minikomputera z napięcia wejściowego modułu (VIN). W celu stabilizowania napięcia do wymaganego przez Raspberry Pi 5 V można wlutować przetwornicę D24V10F5 w specjalnie przygotowane otwory 5 V (napięcie wyjściowe) GND (masa) VOUT (napięcie zasilania silników). 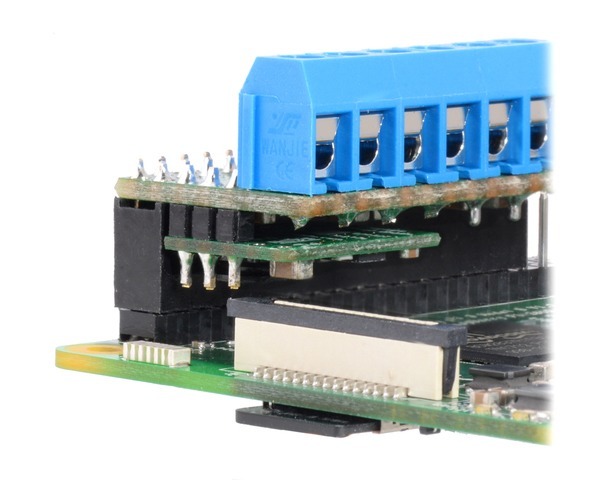
Dwukanałowy kontroler silników w formie nakładki Raspberry Pi Hat został zaprojektowany do wykorzystania z płytkami Raspberry Pi w wersjach A+, B+, 2, 3, 3+ i 4. Nakładka została stworzona przez renomowaną firmę Pololu, której Botland jest oficjalnym dystrybutorem.
Rozszerzenie wykorzystuje do działania układ MAX14870. Umożliwia on sterowanie zarówno kierunkiem obrotu silników, jak i ich prędkością obrotową. Część logiczną zasila płytka główna, natomiast silniki wymagają osobnego źródła zasilania.
Kontroler silników w formie nakładki Raspberry Pi Hat można wykorzystać na przykład podczas budowania własnych robotów lub zdalnie sterowanych pojazdów. Sprawdzi się on także do nauki elektroniki, między innymi podczas poznawania zasady działania silników czy metod ich programowania.
Więcej informacji o produkcie możesz znaleźć na stronie producenta, do której link znajduje się w sekcji pod opisem. Umieszczone są tam również odnośniki do schematu modułu, dokumentacji technicznej głównego układu MAX14870 oraz biblioteki dla Raspberry Pi w języku Python (w serwisie GitHub).
Przydatne linki |
| Napięcie zasil. od | 5.0 V |
| Napięcie zasil. do | 28.0 V |
| Wydajność prąd | 1.7 A |
| Szerokość opakowania | 9 cm |
| Wysokość opakowania | 7.6 cm |
| Głębokość opakowania | 7 cm |
| Masa opakowania | 0.012 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




















