






































































































































































































































































































































































- Produkt wycofany

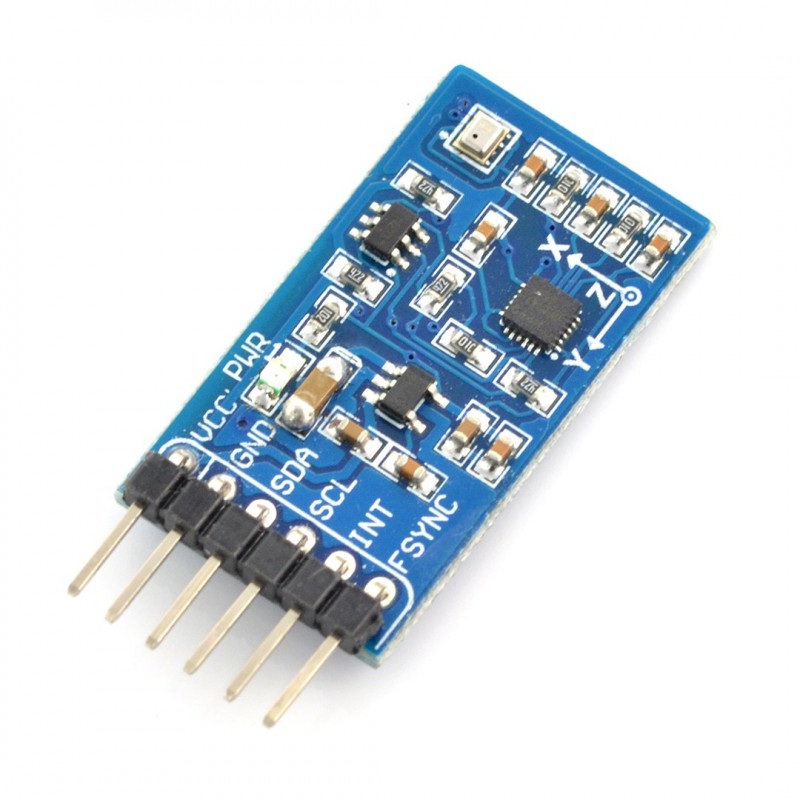



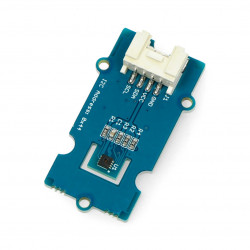
Czujnik jest połączeniem 3-osiowego żyroskopu, akcelerometru i kompasu. Pozwala na pomiar przyspieszeń, pola magnetycznego oraz prędkości kątowej w konfigurowalnych zakresach. Wbudowany barometr pozwala mierzyć ciśnienie i wysokość. Moduł komunikuje się poprzez I2C, zasilany jest napięciem 3,3 do 5,5 V.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
Czujnik jest połączeniem 3-osiowego cyfrowego żyroskopu, akcelerometru i kompasu. Pozwala na pomiar przyspieszeń, pola magnetycznego oraz prędkości kątowej w konfigurowalnych zakresach. Dodatkowo wbudowany barometr pozwala mierzyć ciśnienie i dzięki temu wysokość nad poziomem morza. Moduł komunikuje się poprzez magistralę I2C, zasilany jest napięciem 3,3 do 5,5 V.

IMU 10DoF - MPU9255 + BMP280 - 3-osiowy akcelerometr, żyroskop i magnetometr oraz barometr.
Wyprowadzeniami są przylutowane, proste złącza goldpin raster 2,54 mm. Dzięki nim możliwie jest połączenie płytki z modułem głównym (np. Raspberry Pi czy Arduino) za pomocą przewodów. Moduł komunikuje się przez magistralę I2C.
| Pin | Opis |
|---|---|
| VCC | Zasilanie od 3,3 V do 5,5 V |
| GND | Masa układu |
| SDA | Linia danych magistrali I2C |
| SCL | Linia zegarowa magistrali I2C |
| INT | Przerwanie cyfrowe układu MPU9255 |
| FSYNC | Sygnał pionowy synchronizacyjny układu MPU9255 |

Przedmiotem sprzedaży jest sam czujnik, płytkę stykową należy zakupić osobno.
| Test | 3 |
| Szerokość opakowania | 6 cm |
| Wysokość opakowania | 0.5 cm |
| Głębokość opakowania | 4.5 cm |
| Masa opakowania | 0.003 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Seednew Limited 3/F, Building 6, Shanglilang Zhichuangyuan, Pingji Avenue, Nanwan Street, Longgang District, Shenzhen, 518115, China
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




