


























































































































































































































































































































































































































Listwa z sześcioma czujnikami odbiciowymi do edukacyjnego robota Zumo. Pozwala na wykrycie krawędzi ringu, dodaje także robotowi funkcje śledzenia linii - line follower.
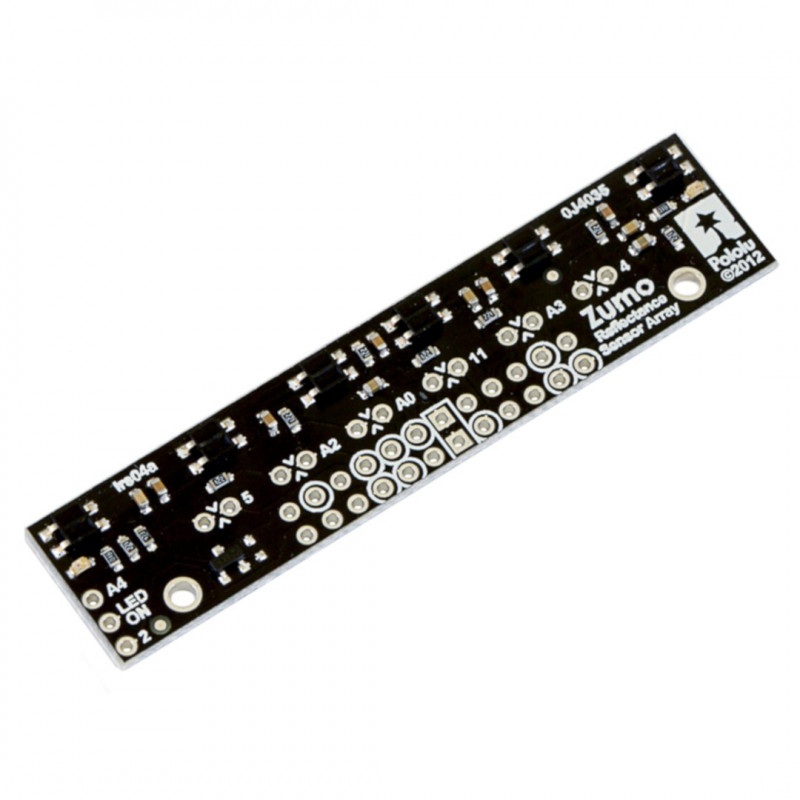
Listwa z czujnikami odbiciowymi pozwala w prosty sposób dodać możliwość śledzenia linii do robota Zumo oraz wykrywać krawędzie ringu. Płytka zawiera sześć optycznych czujników odbiciowych. Każdy z nich składa się z pary - fototranzystora i podczerwonej diody nadawczej. Fototranzystor mierzy jak dużo światła wysłanego poprzez nadajnik powróciło do czujnika, dzięki temu użytkownik jest w stanie odróżnić barwę podłoża.
Listwę podłącza się do przedniego złącza płytki głównej Zumo Shield, które zawiera wszystkie niezbędne wyprowadzenia (zasilanie oraz piny I/O). Moduł pozwala modyfikować połączenia czujników z pinami Arduino, szczegóły w instrukcji (ang).
Pololu Zumo - listwa z czujnikami odbiciowymi.

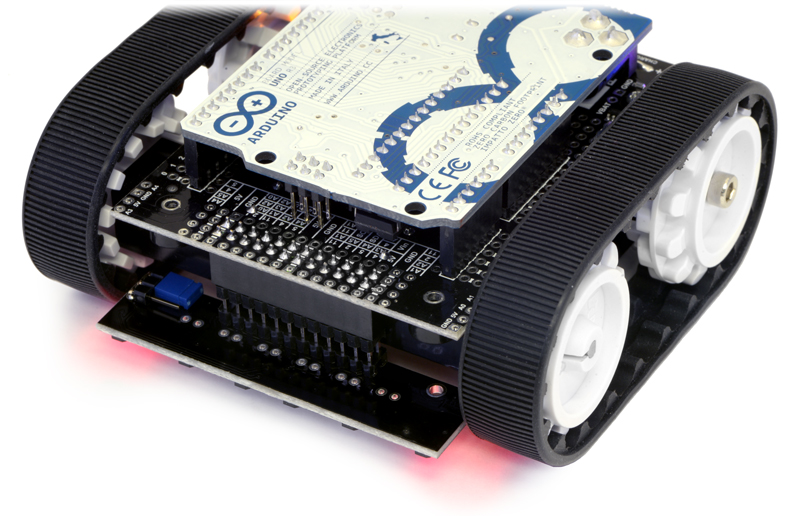
Listwa czujników obiciowych Zumo wysyłana jest ze wszystkimi komponentami niezbędnymi do połączenia z Zumo Shield. Męskie, podwójne złącza goldpin, należy zmontować tak jak pokazano na rysunku powyżej - krótsza stroną do płytki z czujnikami. Podwójną listwę żeńską należy przylutować w przedniej części płytki głównej Zumo Shield.
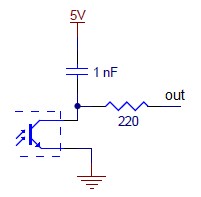
Odczyt odbywa się poprzez pomiar czasu rozładowania kondensatora. Dzięki takiemu rozwiązaniu użytkownik nie musi korzystać z przetwornika analogowo-cyfrowego.
Typowa sekwencja odczytu wartości czujników:
1. Włączenie diod IR ( jeśli zostały wcześniej wyłączone)
2. Ustawienie wyprowadzeń I/O mikrontrolera jako wyjścia oraz wygenerowanie stanu wysokiego.
3. Odczekanie kilku mikrosekund dla naładowania kondensatora 1nF
4. Ustawienie wyprowadzeń I/O jako wejścia (stan wysokiej impedancji)
5. Pomiar czasu rozładowania kondensatora poprzez czekanie aż linie I/O przejdą w stan niski.
6. Wyłączenie diod IR (opcjonalne).
Powyższe kroki powinny być wykonywane równolegle dla wszystkich sześciu czujników.
Biblioteka Arduino dla Zumo zawiera funkcje pozwalające w prosty sposób odczytywać wartości z czujników oraz kontrolować nadajniki podczerwieni. Dzięki temu użytkownik nie musi samodzielnie implementować w programie powyższych sekwencji.
Przy dużym natężenie światła odbitego (barwa jasna), czas rozładowania kondensatora będzie oscylował w granicach kilku mikrosekund, przy braku odbicia wzrośnie do kilku milisekund. Sensowne wartości można mierzyć w odstępach 1ms - jeśli odróżniany będzie tylko kolor czarny od białego bez barw pośrednich, co jest wystarczające w przypadku minisumo i line followerów. Pozwala to na próbkowanie z częstotliwością 1kHz wszystkich sześciu czujników. Jeśli niższa częstotliwość jest satysfakcjonująca, można ograniczyć zużycie prądu poprzez wyłączenie nadajników podczerwieni. Przykładowo dla 100Hz diody nadawcze mogą być wyłączone przez 90% czasu, obniżając w ten sposób średni pobór prądu z 40mA do 4mA.

W celu zminimalizowania poboru prądu nadajniki podczerwieni zostały połączone w dwa równoległe moduły i zasilone napięciem 7,45 V pobieranym z płytki głównej Zumo Shield. Wszystkie diody nadawcze kontrolowane są poprzez tranzystor MOSFET, sygnałem logicznym LEDON, który podciągnięty jest do VCC ustawiając domyślnie nadajniki załączone. Użytkownik może wyłączać diody nadawcze, aby zmniejszyć pobór energii.
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 10.2 cm |
| Wysokość opakowania | 0.7 cm |
| Głębokość opakowania | 10 cm |
| Masa opakowania | 0.01 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin






