

















































































































































































































































































































































































































- Produkt wycofany









Metalowy pług do robota klasy minisumo. Element dedykowany do zestawu Zumo firmy Pololu.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
Metalowy pług do robota klasy minisumo. Element dedykowany do zestawu Zumo firmy Pololu.
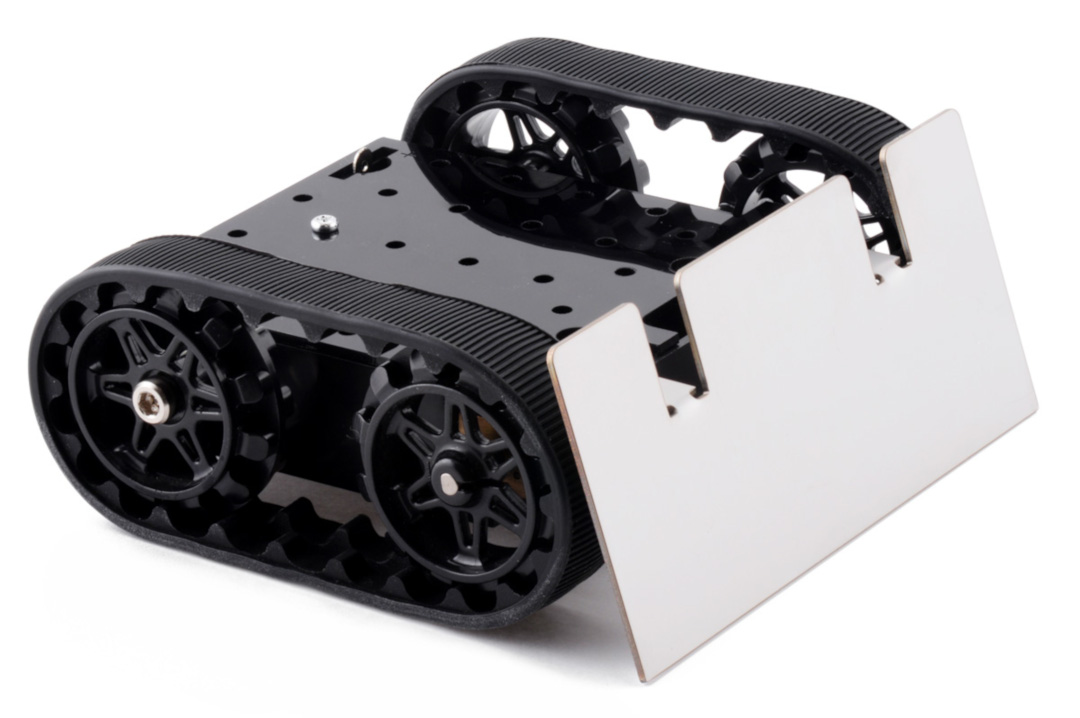
Zumo - pług do robota minisumo - Pololu 1410.
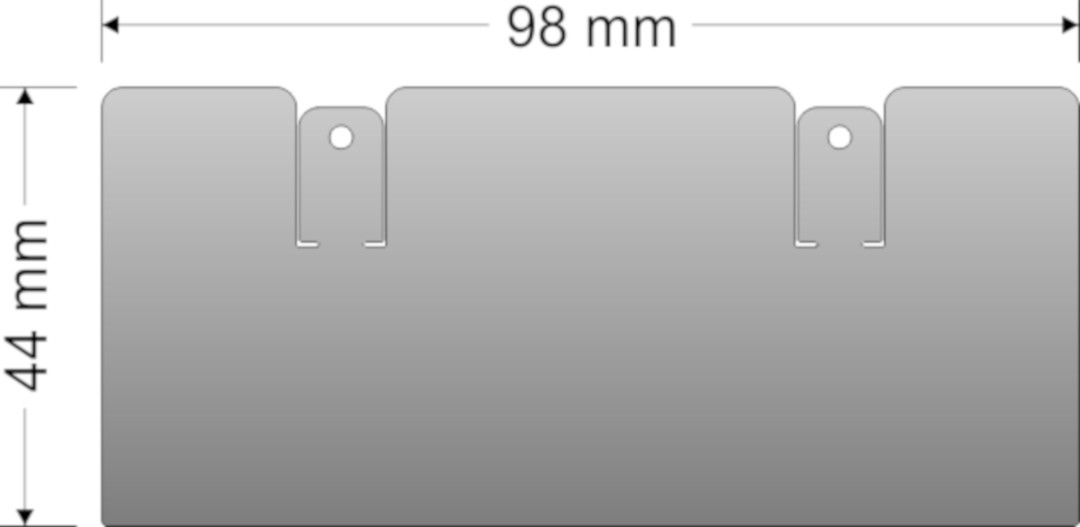
Pług jest prostokątem o wymiarach 98 x 44 mm.
W naszej ofercie znajduje także KIT zawierający częśc mechaniczną pług i cześć elektroniczną zestawu Zumo. Poniżej przedstawiamy listę elementów potrzebnych do budowy kompletnego robota.
Dwa silniki Pololu z serii micro
Firma Pololu udostępnia całą serię micro silników z przekładniami. Różnią się one między sobą mocą oraz zastosowanym przełożeniem. Największą popularnością wśród konstruktorów robotów walczących cieszą się wersje HighPower z przełożeniem 30:1 i 50:1.
Tabela przedstawia parametry przykładowych silników przy napięciu zasilania 6V.
|
Przekładnia |
Prędkość |
Maksymalna prędkość |
Moment |
Maksymalny prąd |
|
|
320 RPM |
0,65 m/s |
(65 cm/s) |
1,8 kg*cm |
1600 mA |
|
|
400 RPM |
0,80 m/s |
(80 cm/s) |
1,6 kg*cm |
1600 mA |
|
|
625 RPM |
1,3 m/s |
(130 cm/s) |
1,1 kg*cm |
1600 mA |
|
|
1000 RPM |
2,0 m/s |
(200 cm/s) |
0,6 kg*cm |
1600 mA |
|
|
120 RPM |
0,25 m/s |
(25 cm/s) |
0,9 kg*cm |
360 mA |
|
|
170 RPM |
0,35 m/s |
(35 cm/s) |
0,6 kg*cm |
360 mA |
|
|
250 RPM |
0,50 m/s |
(50 cm/s) |
0,5 kg*cm |
360 mA |
|
|
440 RPM |
0,90 m/s |
(90 cm/s) |
0,3 kg*cm |
360 mA |
|
W celu zasilania robota wymagane są cztery alkaiczne baterie AA (duże paluszki). Zalecamy użycie akumulatorów NiMH, ponieważ posiadają możliwość wielokrotnego ładowania.
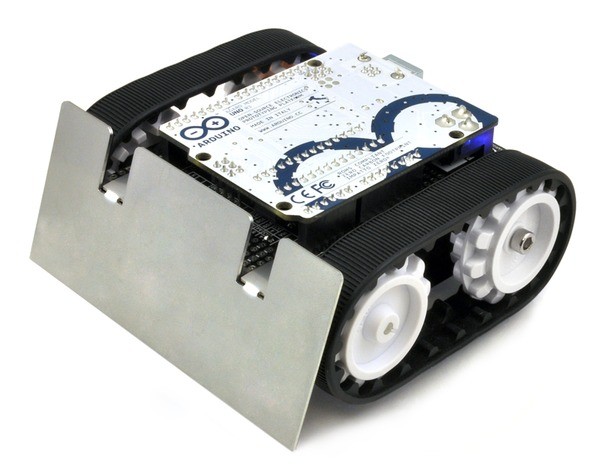
Kontroler pozwalający zbudować robota walczącego minisumo w oparciu o popularny moduł Arduino - Uno lub Leonardo. Płytkę można zamontować na dedykowanym podwoziu, podłączając również baterię oraz silniki Pololu z serii micro.
Zestaw współpracuje zarówno z wersją Uno i Leonardo. Kompatybilne są także starsze modele z takim samym rozkładem wyprowadzeń np. Arduino Duemilanove.
Oprócz wyżej wymienionych elementów wymaganych do działania robota, użytkownik może dobrać podzespoły dodatkowe. Są to:
Pozwala na wykrycie białej linii znajdującej się na krawędzi ringu. Dzięki odpowiedniemu oprogramowaniu robot może zatrzymać się przed wypadnięciem poza dopuszczalny obszar.
Pozwala na wielokrotne użycie akumulatorów NiMH.
Elementy optyczne pozwalające wykryć gdzie znajduje się przeciwnik. Najczęściej stosowane są sensory cyfrowe o zasięgu 40cm. Ich zalety to niewielkie rozmiary oraz szybkość pomiaru.
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Dane GPSR
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin





