












































































































































































































































































































Wybór właściwego silnika - DC vs krokowy vs serwo
Bardzo możliwe, że w tej chwili jesteś w pobliżu przynajmniej jednego typu silnika. Są one praktycznie wszędzie, od kamer i wentylatorów, do odtwarzaczy DVD i wibracji w telefonie. Istnieje ich tyle, że ciężko wybrać właściwy silnik i nie przegapić przy tym niektórych jego ważnych parametrów. Dzięki temu poradnikowi dowiesz się jakie są różnice między poszczególnymi silnikami.
Typy silników
Porównamy 3 najczęściej spotykane typy silników - prądu stałego DC, krokowy i serwo. Uwzględniono tu ich zastosowania, zalety i wady.
1. Szczotkowe i bezszczotkowe silniki prądu stałego
Silniki prądu stałego DC to elektromagnetyczne urządzenia. Używają one interakcji pomiędzy polem magnetycznym, a przewodnikiem elektrycznym, aby skonwertować energię elektryczną na energię mechaniczną, żeby wywołać obroty. Jest wiele rodzajów silników DC na rynku. Szczotkowe i bezszczotkowe są najpowszechniejsze.
Szczotkowy silnik prądu stałego
Szczotkowe silniki DC istnieją już od XIX wieku. Teraz są już prawie wszędzie - w zabawkach, urządzeniach domowych, wentylatorach komputerowych, itd. Można je bardzo łatwo zbudować i kontrolować. Normalne jest więc to, że elektryczne silniki szczotkowe nadal są ulubionymi silnikami profesjonalistów i hobbystów.

Silniki szczotkowe DC mają różne rozmiary
(Źródło: Alliedmotion)
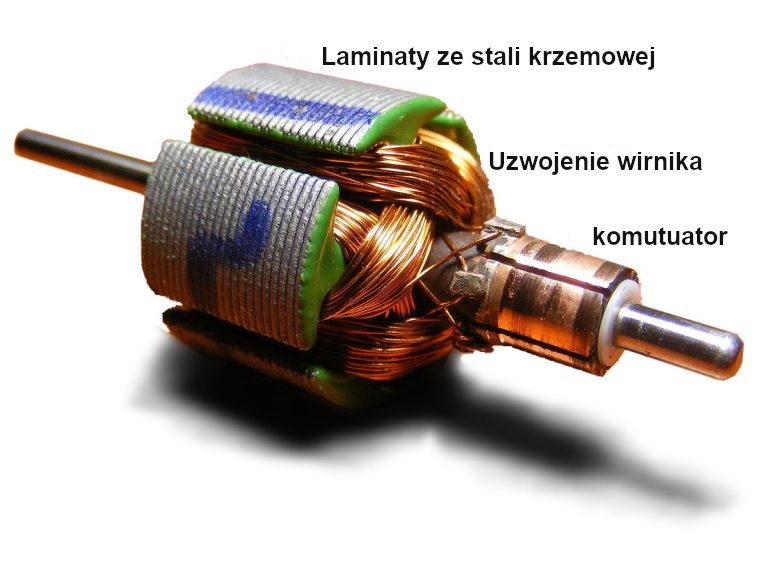
Wnętrze silnika szczotkowego
Dlaczego taka nazwa? Prąd jest dostarczany przez dwie stacjonarne metalowe szczotki, które nawiązują kontakt z różnymi segmentami na pierścieniu. Podczas obrotów komutatora, szczotki dotykają każdego kolejnego odcinka, a więc kontynuują obroty silnika. Jak można sobie wyobrazić, wytwarza to wiele tarć, a więc również ciepło, a czasami nawet iskry.
Zasada działania:
Schemat działania silnika szczotkowego.
(Źródło: Renesas)
Jak porusza się silnik elektryczny? Składa się on z cewek podłączonych do segmentów na pierścieniu lub komutatorze. Cewki otoczone są przez dwa magnesy lub stojan, który otacza cewki w polu elektrycznym. Kiedy prąd jest przesyłany drutem w polu magnetycznym, doświadcza on mocy. A więc cewki w silniku też doświadczają mocy, która je popycha i zaczyna obracać. Powyższy GIF prezentuje zasadę działania silnika szczotkowego. Cewka doznaje siły kierującej w dół kiedy sięga miejsca po prawej, i siły kierującej w górę kiedy dotyka miejsca po lewej. Jednostajne obroty mogą być osiągnięte poprzez dodanie kilku cewek wpiętych w różne odcinki na komutatorze. Kierunek działania zostanie zmieniony po odwróceniu biegunowości styków silnika.
Wady i zalety:
Zalety:
- Łatwy w sterowaniu
Sterowanie silnikiem szczotkowym DC jest proste. Wystarczy podłączyć do nich napięcie, aby zaczęły pracować. Zwalniają kiedy napięcie jest niższe, a gdy napięcie zostanie odwrócone, obracają się w inną stronę.
- Doskonały moment obrotowy przy niskich obrotach
Wysoki moment obrotowy osiągany jest przy niskiej prędkości.
- Całkiem wydajny
Silniki szczotkowe DC są wydajne w 75-80 %.
- Niedrogi
Typowy silnik szczotkowy DC kosztuje tylko około 10 złotych.
Wady
- Głośny
Hałas jest zarówno wynikiem pocierających się części jak i silnych iskier. Wytwarzane są one w miejscach, gdzie szczotki pomijają otwory w komutatorze. Może to spowodować potencjalne zakłócenia w innych częściach systemu.
- Ciągła konserwacja
Stałe poruszanie się może szybko zniszczyć szczotki. Wymagają one stałej konserwacji. Również prędkość może być ograniczona przez nagrzewanie się szczotek.
Zastosowanie:
Obecnie niektórzy twierdzą, że silniki szczotkowe nie mają już takiego znaczenia, ponieważ, w wielu przypadkach, zostały zastąpione przez silniki bezszczotkowe. Jednakże, jest to nieprawda. Silniki szczotkowe mogą nadal być najlepszym rozwiązaniem w wielu urządzeniach przemysłowych, które wymagają stałego momentu obrotowego w całym zakresie prędkości silnika. Można ich użyć m.in. w telefonach komórkowych (do wytworzenia wibracji), zabawkach, przenośnych wiatrakach, bezprzewodowych wiertarkach, oknach samochodowych i wielu, wielu innych. Silnik szczotkowy może być bardziej odpowiednią opcją, jeśli najbardziej zależy Ci na prostym systemie kontroli i niskim koszcie.
Bezszczotkowe silniki prądu stałego
Silniki DC bezszczotkowe są mechanicznie prostsze niż silniki szczotkowe. Komutacja jest osiągana elektrycznie, więc iskry i hałas nie wchodzą w grę. Dzięki temu, zmiana prądu jest cicha, a silnik działa bezgłośnie. Takie ciche silniki znajdują zastosowanie w wentylatorach komputerów, napędach dyskowych, dronach, pojazdach elektrycznych i wysoce sprecyzowanych serwomechanizmach.
Schemat działania silnika bezszczotkowego.
(Źródło: Renesas)
Bezszczotkowy silnik prądu całego posiada tylko jedną ruchomą część - wirnik. Jego obecność sprawia, że komplikacje, które były powodowane przez szczotki w silnikach szczotkowych, nie występują. Wirnik składa się z pierścienia ze stałych magnesów, a cewki są stacjonarne. Dzięki temu, szczotki są niepotrzebne. Trudne jest kontrolowanie biegunowości prądu płynącego przez cewki i utrzymanie go w synchronizacji z prędkością wirnika. Może to być osiągnięte mierząc siłę elektromagnetyczną (SEM) albo używając czujnika Halla do bezpośredniego zmierzenia pozycji magnesu. Z tego powodu, silniki bezszczotkowe, pomimo swoich wielu zalet, są zazwyczaj droższe i bardziej skomplikowane.
Wady i zalety:
Zalety:
- Cichy
Generują one mniej hałasu elektrycznego w porównaniu do silników szczotkowych, ponieważ nie używają szczotek. Dlatego więc, elektryczne silniki bezszczotkowe są częściej wybierane wtedy, gdy ważna jest cicha praca silnika.
- Wydajny
Elektryczny silnik bezszczotkowy jest bardziej wydajny niż silnik szczotkowy, ponieważ potrafi stale osiągać maksymalną moc obrotową/moment obrotowy. Silniki szczotkowe natomiast, osiągną maksymalny moment obrotowy tylko w pewnym momencie w czasie obrotów. Aby silnik szczotkowy osiągał takie same obroty jak silnik bezszczotkowy, potrzebuje on większego magnesu.
- Wymaga rzadszej konserwacji
Elektryczny silnik bezszczotkowy ma długą żywotność, ponieważ nie posiada szczotek do wymiany.
Wady:
- Kontroler
Niektóre bezszczotkowe silniki trudno kontrolować i potrzebują one specjalnego regulatora.
Zastosowanie:
Dzięki wydajności i żywotności, silniki bezszczotkowe zastąpiły większość swoich odpowiedników ze szczotkami. Znalazły one zastosowanie w urządzeniach, które pracują bez przerw, np. w pralkach, klimatyzatorach i w elektronice użytkowej (wentylatory w komputerach, napędy dysków, itd.). Od niedawna, używa się ich także w dronach, bo prędkość obrotowa każdego wirnika może być precyzyjnie kontrolowana. W bliższej przyszłości, możemy spodziewać się, że silniki bezszczotkowe będą miały więcej zastosowań.
2. Silniki krokowe
Silniki krokowe poruszają się wolnymi i dokładnymi obrotami. Cenione są za dokładną kontrolę pozycji i dlatego też znajdują niezliczone zastosowania m.in. w drukarkach stacjonarnych, kamerach monitoringu, frezarkach CNC, itd.
Zasada działania:
Schemat działania silnika krokowego.
(Źródło: emmeshop)
Silniki krokowe posiadają system kontroli, który wysyła elektryczne impulsy do sterownika. On z kolei interpretuje je i wysyła proporcjonalną ilość napięcia do silnika. Następnie, silnik porusza się o dokładnie ustalonych kątach. Działa on podobnie do bezszczotkowego silnika prądu stałego (DC), z wyjątkiem tego, że wykonuje o wiele mniejsze obroty. Jego jedyna ruchoma część to również wirnik, który składa się z magnesów. Biegunowość każdej cewki kontrolowana jest przez prąd przemienny. Po jej zmianie, każda cewka jest popychana lub pociągana, co porusza silnik.
Silniki te mogą być kontrolowane powszechnie dostępnymi i tanimi mikrokontrolerami. Jednakże, silnik krokowy jest pożeraczem prądu. Wykonywane przez niego małe kroki oznaczają także, że najwyższa prędkość jest niska, a kroki mogą być teoretycznie pominięte, gdy używane jest duże obciążenie.
Wady i zalety:
Zalety:
- Dokładne pozycjonowanie
Silniki krokowe posiadają dużą liczbę biegunów, zazwyczaj od 50 do 100. Silniki mogą dokładnie poruszać się pomiędzy tymi biegunami bez pomocy kodera pozycji. A ponieważ poruszają się precyzyjnymi obrotami, są używane najczęściej w urządzeniach wymagających dokładnego pozycjonowania, np. w drukarkach 3D, urządzeniach CNC, platformach kamer, ploterach X i Y.
- Szczegółowa kontrola prędkości
Precyzyjne wzrosty w ruchach pozwalają na doskonałą kontrolę prędkości, dzięki czemu, silniki te nadają się do automatyki i robotyki.
- Znakomite cechy momentu obrotowego przy niskiej prędkości
Silniki krokowe posiadają maksymalny moment obrotowy przy małej prędkości (poniżej 2000 rpm). To sprawia, że są odpowiednie dla urządzeń, które nie potrzebują dużej prędkości, ale wymagają wysokiej precyzji. Standardowe silniki elektryczne i serwa nie posiadają tak dużego momentu obrotowego przy niskich prędkościach.
- Doskonały moment obrotowy do utrzymywania pozycji
Nadają się do urządzeń z wysokim momentem trzymania.
- Łatwo kontrolowany
Silniki krokowe mogą być w prosty sposób kontrolowane używając takich mikrokontrolerów jak ATmega, które są łatwo dostępne na płytkach rozwojowych Arduino.
Wady
- Hałas
Silniki krokowe nie są ciche gdy pracują. Więc, jeśli twoje urządzenie ma być bezgłośne, ma pomieścić duży zakres prędkości i momentów obrotowych oraz ma utrzymać odpowiednią wydajność, wybierz lepiej silnik elektryczny. Lecz jeśli twoje urządzenie kontroli ruchu musi zostać szybko zbudowane, nie musi być wydajne i akceptowalne jest trochę hałasu, wtedy bardziej odpowiedni jest silnik krokowy.
- Ograniczony moment obrotowy o dużej prędkości
Na ogół, silniki krokowe posiadają mniejszy moment obrotowy przy wysokich prędkościach, niż przy niższych. Niektóre z tych silników może być zoptymalizowana tak, aby moment obrotowy był wyższy przy dużych prędkościach. Jednakże, żeby to zrobić, silnik musi być sparowany ze sterownikiem.
- Niska wydajność
W przeciwieństwie do silników elektrycznych, silnik krokowy pobiera maksymalną wartość prądu, niezależnie od obciążenia. Więc może się przegrzewać.
- Może pomijać obroty
Najwyższe prędkości silników są niskie, mogą pomijać obroty przy wysokich obciążeniach.
Zastosowanie:
Silniki krokowe mają różne zastosowania i są używane w wielu powszechnych maszynach i sprzętach. Nadają się do urządzeń wymagających dokładnego pozycjonowania, momentów obrotowych o niskiej prędkości, i kontroli prędkości. Urządzenia te to m.in. frezarki CNC, maszyny do obrazowania medycznego, drukarki, kamery monitoringu, drukarki 3D, itp.
3. Serwomechanizmy
Serwomechanizmy są w stanie dostarczyć bardzo precyzyjną kontrolę ruchu. Sprzężenie zwrotne, wykrywa różnicę pomiędzy rzeczywistą, a pożądaną prędkością lub pozycją. A więc kontroler może dostosować wyjście, aby poprawić każde oddalenie się od docelowej pozycji. Pozycjonujący i o stałych obrotach to dwa podstawowe rodzaje silników serwo.

Serwo ze złączem Grove.
Zasada działania:
Serwomechanizm składa się z silnika elektrycznego. Silniki elektryczne działają przy wysokim rpm i bardzo niskim momencie obrotowym. Jednakże, w silniku serwo rozmieszczone są koła zębate, które spowalniają wysoką prędkość wewnętrznego silnika elektrycznego, jednocześnie zwiększając moment obrotowy. Innymi słowy, prędkość obrotowa serwonapędu jest znacznie mniejsza, ale posiada większy moment obrotowy. Koła zębate są zazwyczaj plastikowe, aby silnik był lżejszy i tańszy. Ale w silnikach serwo, posiadających większy moment obrotowy, zbudowanych do trudniejszych zadań, koła zębate są metalowe.
Serwonapęd posiada czujnik położenia lub enkoder na ostatnim biegu. Bazując na kontroli obwodu zamkniętego, mikrokontroler porównuje rzeczywistą i pożądaną pozycję rotora, i generuje sygnał błędu. Jest on później użyty do wytworzenia odpowiedniego sygnału kontrolnego, aby umieścić wirnik na końcowej pozycji. Wyszukane serwa mierzą także prędkość potrzebną do dostarczenia bardziej precyzyjnego i płynnego ruchu.
Serwa o różnym kącie obrotu - powszechnie używane w małych projektach, w których wymagane jest umiarkowane pozycjonowanie. Jest to najpowszechniejszy i najtańszy rodzaj serwa. Obraca się on w zasięgu 180 stopni. Nie posiada kontroli prędkości lub stałych obrotów. Serwo to ma fizyczne blokady wbudowane w mechanizm koła zębatego, aby zapobiec przekręceniu poza ograniczenia chroniące czujnik obrotowy.
Serwa o ruchu ciągłym - w przeciwieństwie do serw pozycjonujących, te serwa mogą stale obracać się zgodnie i niezgodnie z ruchem wskazówek zegara z różną prędkością, w zależności od sygnału polecenia.
Wady i zalety
Zalety:
- Właściwości doskonałego momentu obrotowego przy wysokich prędkościach
Przy prędkościach wyższych niż 2000 rpm, silniki serwo mają wyższy moment obrotowy i najlepiej nadają się do pracy w urządzeniach o dużej prędkości i wysokim momencie obrotowym, które obejmują dynamiczne zmiany obciążenia. Silniki te mogą wytwarzać wyższy szczytowy moment obrotowy, ponieważ potrafią działać przy wyższych prędkościach.
- Różnorodność
Mają różne rozmiary i momenty obrotowe.
- Niski koszt
Małe serwa kosztują tylko kilkanaście złotych. Wiele z nich posiada plastikowe koła zębate, aby były lekkie i tanie.
Wady:
- Drganie
Mechanizm sprzężenia zwrotnego w serwie będzie ciągle próbował poprawić wszelkie odchylenia od docelowej pozycji. Wynikiem tej stałej regulacji będzie drganie podczas utrzymywania stabilnej pozycji. Jeśli nie chcesz mieć takiego problemu, wybierz silnik krokowy.
Serwonapędy znajdują zastosowanie w wielu miejscach - od zwykłych zabawek po obiekty codziennego użytku i samochody. Są one wykorzystywane w zdalnie sterowanych autach, aby nimi kierować. Używane też są w odtwarzaczach DVD, aby wsuwać i wysuwać płyty. Obszernie się ich także używa w robotyce. Posiadają różne kształty i rozmiary, więc możesz być pewny, że Ty też znajdziesz odpowiednie serwo.
Właśnie te podstawowe informacje możesz uwzględnić przy wybieraniu silnika. Specyfikacje takie jak prędkość, moment obrotowy, natężenie czy napięcie również pomogą zdecydować, który silnik będzie odpowiedni do Twojego projektu, więc nie zapomnij zwrócić uwagi na wymagania. Pamiętaj też, że jeden czynnik często będzie decydował o wielu rzeczach. Wiedząc, które silniki są dostępne i tworząc parametry swojego projektu, możesz uniknąć kosztownych pomyłek i wybrać najlepszy silnik.
Czy dopiero odkrywasz świat silników i nie jesteś pewien jak zacząć z nimi pracować? My wierzymy, że każdy jest w stanie zbudować udany projekt elektroniczny i nikt nie powinien być pozbawiony tej przyjemności tylko dlatego, że utkwił przy lutowaniu lub debugowaniu obwodów elektrycznych. Początkującym polecamy zestaw Grove - łatwy w obsłudze system typu plug-and-play. Jego części można składać jak klocki Lego, więc nie trzeba się przejmować jak użyć płytek stykowych lub przewodów połączeniowych. Zestaw kupisz tutaj.
Posiadamy także szeroki wybór silników prądu stałego, krokowych i serwomechanizmów.