Spis treści:
Samodzielna budowa robota od podstaw to sprawa niełatwa. Zawsze zabraknie jakiejś części przy montażu mechaniki. Gotowe zestawy, a w nich skompletowana maszyna, pozwalają za to przejść od razu do programowania.
Roboty edukacyjne Waveshare
Na bazie robotów Waveshare możemy budować zdalnie sterowane pojazdy. Montaż podwozia, czyli podstawy robota i bazowej elektroniki to bułka z masłem absolutnie dla prawie-każdego, a schody zaczynają się podczas tworzenia robota custom. Ale czy to schody? Jeżeli tak, to prowadzą do miejsca pełnego kreatywności. Nasz robot wykonuje polecenia za pomocą załączonego pilota IR. Możemy wprawić w ruch także pełnoprawne roboty, które samodzielnie śledzą linie na podłożu i omijają przeszkody w nieznanym terenie.
Do wielu zadań w zupełności wystarczające będą kontrolery bazujące na Arduino Uno. Wzbogacenie o dodatkowe elementy to z kolei miejsce na Raspberry Pi Zero, które poradzi sobie nawet z bardziej złożonymi zadaniami. Każdy twórca, worldbuilder, kreator – jakiego słowa byśmy tutaj nie użyli – doceni możliwości usprawniania swojego dzieła w nieskończoność. Z Alphabotem marzenia o robocie mobilnym z kamerą, zdolnym do eksploracji otoczenia i przekazywania obrazu ze swojej misji, wreszcie mogą przestać być marzeniami, bo stają się rzeczywistością. Frajda z modyfikacji i eksperymentowania jest niezastąpiona.
Czym jest Alphabot?
Uniwersalna, dwukołowa platforma z kulką podporową oparta na płytce głównej jest zasilania przez silniki prądu stałego, które można obsługiwać z mikrokontrolerem ze sterownikiem. Oczywiście wliczają się tutaj wspomniane wcześniej mikrokontrolery, ale to zależy od danego zestawu. Siedem zróżnicowanych obejmuje różne dodatkowe moduły i kompatybilności z konkretnymi, niekoniecznie konkurującymi ze sobą platformami.







Alphabot Basic, czyli classic
Podstawa podstaw. AlphaBot Basic to uniwersalna, dwukołowa platforma z kulką podporową. Posiada dwa micro silniki prądu stałego, które można kontrolować przy pomocy dowolnego mikrokontrolera ze sterownikiem. Posiada czujnik linii, moduł mierzenia prędkości, czujnik zbliżeniowy na podczerwień, pilot zdalnego sterowania oraz moduł Uno Plus, serwo i ultradźwiękowy czujnik odległości. Montaż to przykręcenie silników, założenie kół i dowolnego wspomnianego kontrolera. Na platformie wszystko już jest – znajdują się tam sterownik silników LM298P, regulator napięcia LM2596 dla stabilnego napięcia 5 V oraz przetwornik A/C TLC1543. Oprócz tego do naszej dyspozycji pozostają liczne złącza do podłączania wszystkich modułów, jakie tylko przyjdą nam do głowy. Instrukcja w języku angielskim od producenta przeprowadza nas krok po kroku przez podstawowy setup aż do kroku, w którym robot Alphabot jest gotowy do pracy.
Moc robotów kryje się w podwoziu, do którego przytwierdza się wszystkie kluczowe elementy. Spójrzmy na schematy platform.

Platforma Alphabot
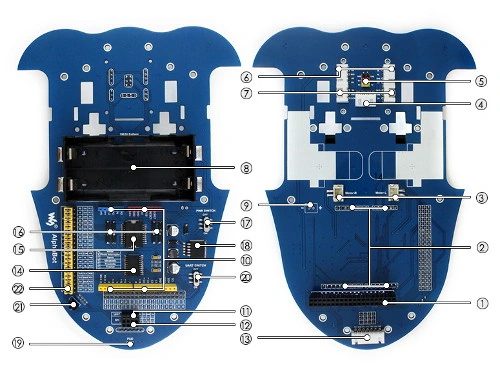
- Interfejs Raspberry Pi: do połączenia z Raspberry
- Interfejs Arduino: do połączenia z Arduino
- Złącze po podłączenia silników
- Złącze do podłączenia ultradźwiękowego czujnika odległości
- Złącze do podłączenia serwomechanizmu
- Złącze do podłączenia modułu unikania przeszkód
- Złącze do podłączenia miernika prędkości
- Koszyk na baterie 18650 (brak w zestawie – do zakupienia osobno)
- Miejsce do podłączenia zewnętrznego źródła zasilania
- Złącza Arduino: do podłączenia nakładek dla Arduino
- Interfejs UART: do podłączenia modułu Bluetooth
- Interfejs SPI: do podłączenia modułu NFR24L01
- Złącze do podłączenia czujnika linii
- Przetwornik TLC1543: 10-bitowy, pozwala na wykorzystanie analogowych modułów z Raspberry Pi
- Mostek LM298P: do sterowania silnikami, do 2 A
- Dioda zapobiegająca prądowi wstecznemu
- Włącznik zasilania
- LM2596: Regulator napięcia 5 V
- Dioda sygnalizująca o zasilaniu
- Przełącznik UART: włącza komunikację między Arduino i Raspberry
- Odbiornik IR: pozwala na sterowanie robotem przez podczerwień
- Wybór Arduino / Raspberry: wybiera, które urządzenie kontroluje peryferia robota
Zależnie od modelu przyglądamy się także innym platformom bazowym.
Platforma Alphabot2-Base
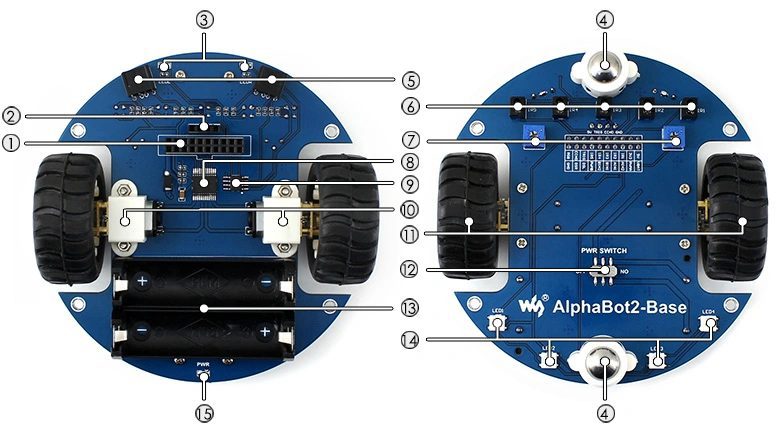
- Interfejs kontrolny AlphaBot2 do podłączenia czujników
- Interfejs modułu ultradźwiękowego
- Wskaźniki omijania przeszkód
- Dwie kulki podporowe typu Omni
- Czujnik na podczerwień ST188 do omijania przeszkód
- Czujnik odbiciowy na podczerwień ITR20001 do wykrywania linii
- Potencjometr regulacji zakresu omijania przeszkód
- TB6612FNG: dwukanałowy mostek H – sterownik silników
- Komparator napięcia LM393
- 2 silniki micro N20; przekładnia 1:30, 6 V, 600 obr/min.
- 2 gumowe koła; średnica 42 mm, szerokość 19 mm
- Włącznik zasilania
- Koszyczek na baterie typu 14500
- Dioda RGB LCD WS2812B
- Dioda – wskaźnik zasilania
Platforma AlphaBot2-Ar
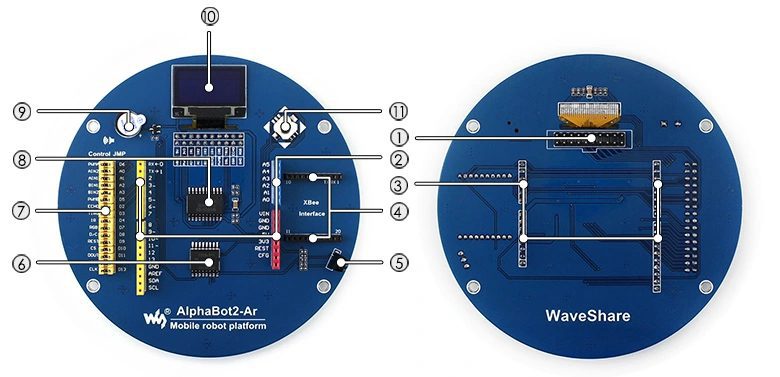
- Interfejs kontrolny AlphaBot2 do podłączenia z AlphaBot2-Base
- Wyprowadzenia Arduino do podłączenia z Arduino
- Interfejs Arduino do podłączenia kompatybilnego kontrolera Arduino
- Konektor Xbee do podłączenia modułu Bluetooth, pilota do sterowania robotem przez Bluetooth
- Odbiornik IR
- Ekspander I/O PC8574, interfejs SPI
- Zworki Arduino
- Buzzer
- Wyświetlacz OLED 0,96″; sterownik SSD1306, rozdzielczość 128 x 64 px
- Joystick
Platforma AlphaBot2 BBC micro:bit
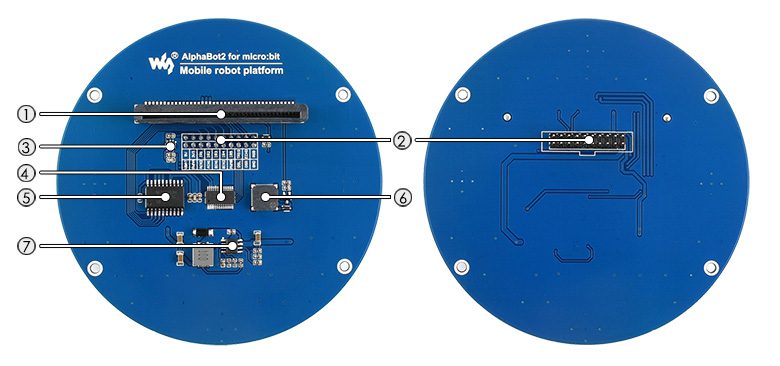
- Złącze do połączenia modułu BBC micro:bit
- Interfejs kontrolny AlphaBot2 do połączenia z AlphaBot2-Base
- RT9193-33: regulator napięcia 3,3 V, zasilanie dla micro:bit
- PCA9685: układ kontroli PWM, rozszerzenie I/O, interfejs I2C
- TLC1543: 10-bitowy przetwornik A/C, pozwala modułowi micro:bit na korzystanie z czujnika śledzenia linii
- Buzzer
- WMP1584: regulator napięcia 5 V
Każdy zestaw zawiera dołączone schematy i instrukcje w języku angielskim. Nie da się ukryć, że zapewnione przez producenta Waveshare diagramy są przy lekturze ubezpieczające, a podstawowy montaż Alphabotów nie wymaga wyjątkowych umiejętności. Wymaga za to elementów montażowych, a komplet tych zawiera każdy zestaw. Można je znaleźć w opisie produktów na stronie sklepu, a schematy i poradniki znalazły w sekcji przydatnych linków.
Jak oceniasz ten wpis blogowy?
Kliknij gwiazdkę, aby go ocenić!
Średnia ocena: 5 / 5. Liczba głosów: 1
Jak dotąd brak głosów! Bądź pierwszą osobą, która oceni ten wpis.








