Spis treści:
Tradycyjne żyroskopy mechaniczne były szeroko stosowane w lotnictwie i nawigacji przed wprowadzeniem technologii elektronicznych. Te mechaniczne urządzenia wykorzystywały fizyczne właściwości obrotowego ciała stałego, aby utrzymać stałą orientację w przestrzeni. Dziś z pomocą przychodzą nam mała i duża elektronika.
Żyroskop elektroniczny - co to jest?
Żyroskop znany jest również jako inercyjna jednostka pomiarowa (z ang. IMU – Inertial Measurement Unit). To urządzenie elektroniczne wykorzystywane do pomiaru prędkości kątowej (ruchu obrotowego) i przyspieszenia kątowego (zmiany prędkości kątowej) danego obiektu w przestrzeni. Uwzględniają w swym działaniu zasadę wykorzystania efektu Coriolisa. Przykład: zlew z odpływem pozwala zaobserwować, jak woda zachowuje się wokół odpływu. Ruch ten jest spowodowany przez obrót Ziemi. Na półkuli północnej woda ta będzie “krążyć” zgodnie z ruchem wskazówek zegara, a w półkuli południowej w drugim, co wynika właśnie z efektu Coriolisa.
Istnieje wiele klas żyroskopów, w zależności od zasady fizycznej działania i zastosowanej technologii. Żyroskopy mogą być używane samodzielnie lub wchodzić w skład bardziej złożonych systemów, takich jak wspomniane inercyjne jednostki pomiarów, żyrokompasy, systemy nawigacji czy systemy odniesienia kursu. Dziś w szczególności interesują nas żyroskopy z systemem mikroelektromechanicznym (MEMS). Żyroskopy MEMS (z ang. Microelectromechanical Systems) są rodzajem czujników inercyjnych, które wykorzystują mikroelektroniczne i mikromechaniczne technologie do pomiaru prędkości kątowej obrotu obiektu. Niewielkie struktury wykonane z krzemionki lub innych materiałów stosowanych w mikromechanice są wprawiane w ruch obrotowy, a następnie zmiana kierunku obrotu wywołuje siły Coriolisa, które są mierzone i przetwarzane na informacje o prędkości kątowej.
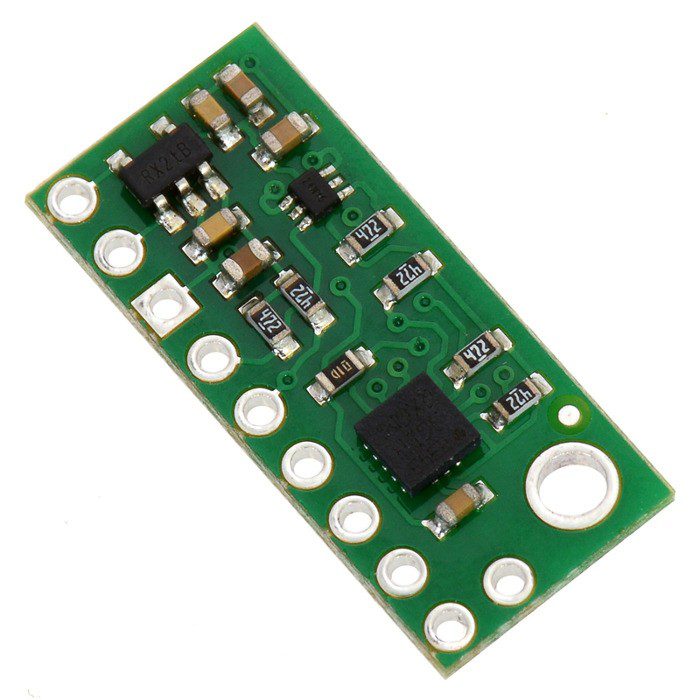
Budowa żyroskopu elektronicznego MEMS
Typowa budowa żyroskopów MEMS obejmuje mikroelektroniczne czujniki MEMS, które zawierają struktury mechaniczne w mikroskali, układy elektroniczne do pomiaru i przetwarzania sygnałów oraz obwody sterujące. Te elementy są zintegrowane na pojedynczym układzie scalonym, co czyni je małymi, lekkimi i energooszczędnymi. Centralnym elementem jest czujnik reagujący na zmiany. Inne czujniki to często sensory pojemnościowe, które wykorzystują zmiany pojemności elektrycznej między mikroskopijnymi elementami w odpowiedzi na ruchy, oraz sensory piezoelektryczne, które wykorzystują zjawisko piezoelektryczności do generowania sygnałów w odpowiedzi na mechaniczne naprężenia. Wbudowane układy elektroniczne mogą wzmacniać, filtrować i analizować otrzymane sygnały w celu uzyskania dokładnych pomiarów prędkości kątowej. Otrzymane dane są przetwarzane przez obwody sterujące, które pozwalają użytkownikowi na kontrolowanie zachowania żyroskopu. Wlicza się w to wszelka kalibracja, kompensacja zakłóceń oraz przetwarzanie danych wyjściowych.
Żyroskop i akcelerometr w parze
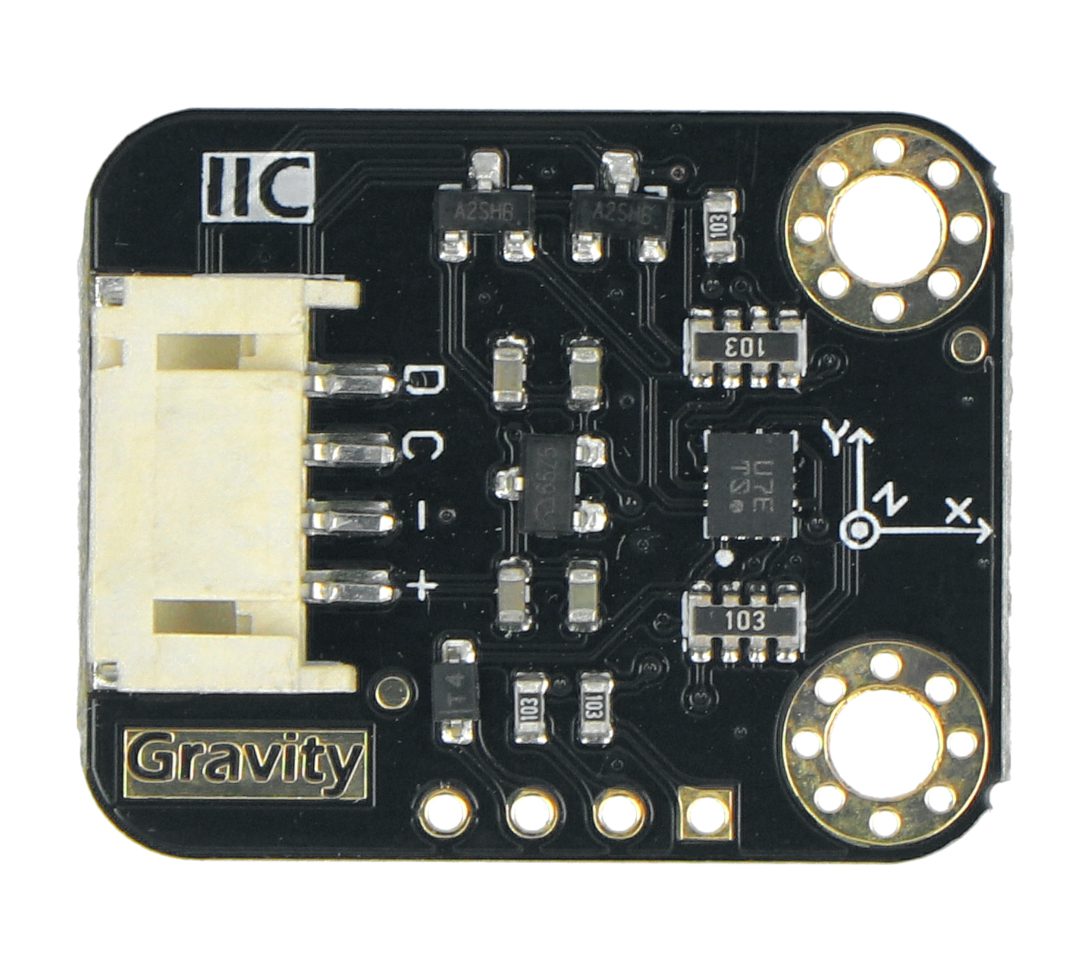
Dlaczego w modułach elektronicznych i licznych tzw. ekosystemach elektroniki, na przykład DFRobot Gravity, żyroskop i akcelerometr występują tak często w parze? Odpowiedź leży w przestrzeni 3D – albo, jak ktoś woli, 4D, bo i ten aspekt pojawi się w jakiejś mierze w tym wyjaśnieniu. Żyroskopy mierzą prędkość kątową zmiany orientacji obiektu, podczas gdy akcelerometry mierzą przyspieszenie liniowe, czyli zmiany prędkości obiektu w kierunku liniowym. Gdy połączyć te dwa rodzaje czujników, można uzyskać kompletną informację na temat ruchu obiektu w przestrzeni trójwymiarowej. Żyroskopy mogą być także podatne na dryf, pewną stopniową zmianę wartości pomiaru prędkości kątowej w czasie, podczas gdy akcelerometry mogą być podatne na szumy i zakłócenia. Wykorzystując oba czujniki równocześnie można kompensować te błędy i uzyskać bardziej stabilne i dokładne pomiary.
W wielu aplikacjach takich jak stabilizacja obrazu w kamerach, kontrolery ruchu w grach wideo czy też w systemach kontroli pojazdów, żyroskopy i akcelerometry są wykorzystywane do stabilizacji lub korekcji. Żyroskopy pomagają w wykryciu zmian orientacji, podczas gdy akcelerometry pomagają w wykryciu przyspieszeń liniowych. Trudno także mówić o rozsądnym śledzeniu ruchu i określaniu pozycji obiektu bez odniesienia do zewnętrznych sygnałów, czyli systemach nawigacji inercyjnej, gdzie po raz kolejny z pomocą przychodzi łączenie danych z obu rodzajów czujników.
Projekty elektroniczne - żyroskopy MEMS
Żyroskopy MEMS są chętnie stosowane w różnych projektach DIY w zakresie elektroniki – zarówno w tych prostych, jak i zaawansowanych. Można wykorzystać żyroskop MEMS w projekcie stabilizacji obrazu dla kamer wideo lub aparatów fotograficznych. Dzięki żyroskopowi uda się wykryć drgania lub ruch kamery, aby móc zastosować odpowiednie korekcje i w rezultacie uzyskać płynne, stabilne nagrania lub zdjęcia. Skoro żyroskop jest dobrze znany w lotnictwie, to modele MEMS mogą być wykorzystywane w projektach budowy własnego drona lub do sterowania lotem drona. Służą wówczas stabilizacji pozycji oraz reagowaniu na zmiany kierunku i orientacji. Ciekawe zastosowania rysuje przed nami rozwijająca się sfera wirtualnej rzeczywistości (VR) i jej pochodnych, gdzie coś musi przecież odpowiadać za śledzenie ruchu głowy użytkownika i umożliwiać coraz to realistyczniejsze doświadczenia interakcji z wirtualnym środowiskiem.
Wybór żyroskopu elektronicznego
Kwestia pierwsza to zakres pomiarowy żyroskopu, czyli maksymalna prędkość kątowa, którą jest w stanie dokładnie zmierzyć. Dokładność pomiaru jest kluczowym czynnikiem, zwłaszcza w aplikacjach wymagających precyzyjnego śledzenia ruchu. Upewnij się, że żyroskop oferuje wystarczającą dokładność dla Twoich potrzeb. Żyroskop powinien także generować pomiary możliwie szybko zwłaszcza w takich zastosowaniach jak kontrola lotu drona. W przypadku licznych urządzeń zasilanych z baterii ważne jest, aby moduł oferował niskie zużycie energii i przedłużał dzięki temu czas pracy urządzenia na jednym naładowaniu. W bardziej rozbudowanych projektach i tych tworzonych od podstaw, a szczególnie z wykorzystaniem mikrokontrolerów, kluczowa kwestia to interfejs komunikacyjny. Znajdziemy wśród nich UART, SPI, I2C, a nawet interfejsy analogowe.
Jak oceniasz ten wpis blogowy?
Kliknij gwiazdkę, aby go ocenić!
Średnia ocena: 5 / 5. Liczba głosów: 3
Jak dotąd brak głosów! Bądź pierwszą osobą, która oceni ten wpis.