Aby silnik utrzymał prędkość obrotową zgodnie z wymaganiami projektowymi aplikacji, poza stabilnym źródłem napięcia zasilającego, niezbędny jest odpowiedni układ sterujący, który poprzez sprzężenie zwrotne monitoruje parametry robocze silnika w czasie rzeczywistym i w przypadku zaistnienia odchylenia poza zadane nastawy odpowiednio koryguje te parametry tak, aby silnik bądź grupa silników stabilnie pracowała.
Do sterowania silnikami można wykorzystać m.in. układ czasowy NE555 w trybie generatora astabilnego, mikrokontrolery AVR Atmega, a także układy scalone TTL. Niestety w każdym z tych przypadków istnieje poważne ograniczenie natury sprzętowej – coraz częściej w aplikacjach o charakterze profesjonalnym, ale także hobbystycznym konstruktorzy sięgają po silniki prądu stałego, które podczas pracy ciągłej pobierają prąd rzędu kilkuset miliamperów, co jest ponad możliwościami wymienionych układów scalonych. W tym celu został zaprojektowany układ scalony o oznaczeniu L293D – dwukanałowy sterownik silników elektrycznych, który może stanowić układ pośredni między mikrokontrolerem a silnikiem, dostarczając przy tym całkiem dużą przepustowość prądową.

Charakterystyka sprzętowa dwukanałowego sterownika silników L293D
Układ scalony L293D firmy ST Microelectronics jest dwukanałowym sterownikiem silników elektrycznych prądu stałego. W obudowie tego układu znajdują się dwa mostki typu H, które umożliwiają równoległe i niezależne sterowanie kierunkiem obrotu obu silników. Zasada działania sterownika jest zbliżona do wzmacniacza sterowanego prądowego – L293D jest oparty na tranzystorach bipolarnych, których bazy wystarczy wysterować niewielkim prądem, który to z kolei będzie odpowiednio wpływał na wartość prądu pobieranego przez silniki. Sterownik L293D oznacza się wieloma zaletami – może być zasilany napięciami z przedziału od 4,5V do 36V, jest odporny na zakłócenia wysokich częstotliwości oraz na wyładowania elektrostatyczne (ESD), ma oddzielne zasilanie obwodu sterującego i silników, a także umożliwia dostarczanie prądu ciągłego o wartości do 0,6A na pojedynczy kanał oraz 1,2A prądu szczytowego na pojedynczy kanał. Ponadto, ten układ scalony może także zostać użyty jako sterownik silników krokowych, układów przekaźnikowych, styczników i innych urządzeń, w których wymagana jest precyzyjna regulacja prądu w sposób ciągły.
Opis wyprowadzeń układu w sterowniku L293D
Układ L293D jest produkowany m.in. w obudowie DIP do montażu przewlekanego (THT) i ma 16 wyprowadzeń, które spełniają następujące funkcje:
1 – ENABLE1 – wyjście sygnału PWM do sterowania prędkością obrotową silnika nr 1
2 – INPUT1 – pierwsze wejście logiczne określające kierunek obrotów silnika nr 1
3 – OUTPUT1 – pierwszy zacisk doprowadzający zasilanie do silnika nr 1
4 – GND – masa
5 – GND – masa
6 – OUTPUT2 – drugi zacisk doprowadzający zasilanie do silnika nr 1
7 – INPUT2 – drugie wejście logiczne określające kierunek obrotów silnika nr 1
8 – VS – napięcie zasilania dla silników
9 – ENABLE2 – wyjście sygnału PWM do sterowania prędkością obrotową silnika nr 2
10 – INPUT3 – pierwsze wejście logiczne określające kierunek obrotów silnika nr 2
11 – OUTPUT3 – pierwszy zacisk doprowadzający zasilanie do silnika nr 2
12 – GND – masa
13 – GND – masa
14 – OUTPUT4 – drugi zacisk doprowadzający zasilanie do silnika nr 2
15 – INPUT4 – drugie wejście logiczne określające kierunek obrotów silnika nr 2
16 – VSS – napięcie zasilania dla obwodu sterującego
Mostek typu H – budowa i zasada działania
Mostek typu H jest układem elektronicznym, którego zadaniem jest podawanie napięcia ze źródła zasilania na silnik o biegunowości zgodnej z zamierzonym kierunkiem obrotów wału silnika – zgodnie lub przeciwnie do ruchu wskazówek zegara. Taki układ jest stosowany m.in. w pojazdach elektrycznych, elektronarzędziach ręcznych, a także innych aplikacjach, w których układy energoelektroniki sterują napędem elektrycznym. Szczególnym przypadkiem jest silnik krokowy dwubiegunowy, którego konstrukcja wymusza stosowanie mostka typu H. Mostek typu H jest także zaimplementowany w układzie scalonym L293D.
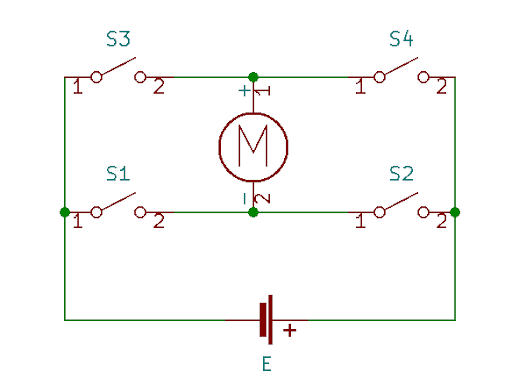
Mostek typu H tworzą cztery przełączniki (S1, S2, S3, S4), przy czym w układach rzeczywistych mają one zwykle postać kluczy tranzystorowych, sterowanych prądowo (tranzystory BJT) lub napięciowo (tranzystory MOSFET). Przełączniki są połączone ze źródłem napięcia zasilającego silnik. Kiedy przełączniki S1 i S4 są zamknięte, a przełączniki S2 i S3 otwarte – wówczas napięcie podawane na silnik jest podawane ze znakiem dodatnim – przyjmijmy, że silnik wówczas kręci się zgodnie z ruchem wskazówek zegara. Natomiast kiedy przełączniki S1 i S4 zostaną rozwarte, a przełączniki S2 i S3 zostaną zamknięte, wówczas napięcie zasilające zmienia znak na ujemny, a silnik będzie obracał się przeciwnie do ruchu wskazówek zegara. Poza możliwością zmiany kierunku obrotów silnika mostek typu H można wykorzystać także jako elektroniczny hamulec silnika. W tym celu należy zamknąć przełączniki S1 i S3, a przełączniki S2 i S4 otworzyć lub na odwrót. Wówczas na zaciskach silnika nie będzie różnicy napięć, a wał silnika nie będzie się kręcił. Jeśli podczas pracy silnika (obracanie się zgodnie lub przeciwnie do ruchu wskazówek zegara) otworzymy przełączniki, wówczas silnik będzie się obracał siłą rozpędu. Należy jednocześnie unikać jednoczesnego zamknięcia wszystkich przełączników lub par S1-S2 lub S3-S4, ponieważ takie połączenie zwiera zaciski źródła zasilania i jeśli źródło nie jest zabezpieczone przed zwarciem, może doprowadzić do jego nieodwracalnego uszkodzenia. Z tego względu, aby zapobiegać takim niepożądanym skutkom, układ sterujący mostkiem typu H musi być tak zaprojektowany, aby dopuszczenie do zwarcia źródła zasilania było awykonalne.
L293D – dwukanałowy sterownik silników 36V/0,6A – zasada działania układu
Układ scalony L293D jest sterownikiem, który umożliwia kontrolę prędkości obrotowej silników, a także wybór kierunku obrotów wraz z możliwością hamowania. W swojej strukturze układ L293D wykorzystuje tranzystory bipolarne PNP i NPN w topologii mostka typu H, po jednym układzie dla każdego silnika osobno. Na rysunku przedstawiono schemat połączeń dla przykładowej aplikacji układu L239D, wykorzystując jedną z jego dwóch par obwodów sterowania i zasilania silników.
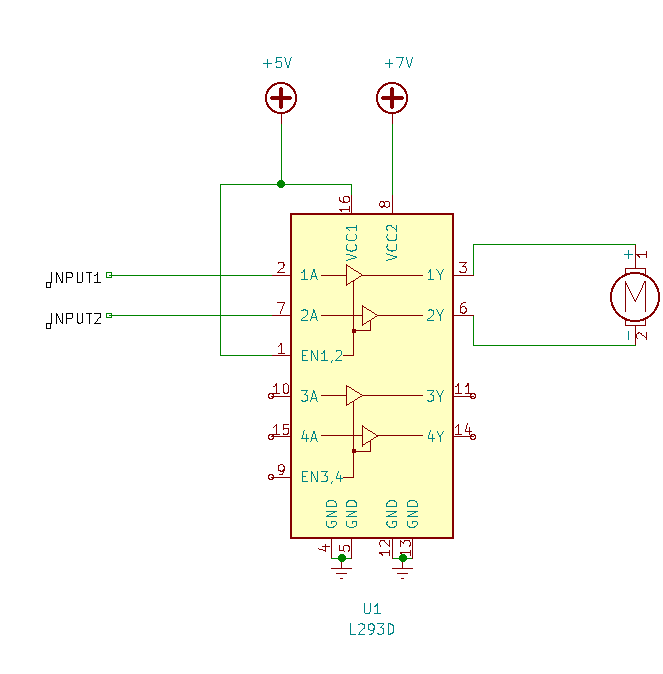
Zaciski silnika są podłączone do wyprowadzeń nr 3 i 6. Kiedy na wyprowadzenie nr 2 jest podany stan wysoki, a na wyprowadzenie nr 7 stan logiczny niski, wówczas silnik obraca się zgodnie z ruchem wskazówek zegara. Natomiast, gdy na wyprowadzenia nr 2 i 7 podamy teraz przeciwne stany logiczne, wówczas silnik zmieni kierunek obrotów w przeciwną stronę. Z kolei, gdy na oba wejścia nr 2 i 7 podamy takie same stany logiczne, wówczas silnik zahamuje. Układ L293D może przekazywać prąd ciągły o wartości do 0,6A na kanał. Z tego względu, aby zwiększyć efektywność i pewność funkcjonowania układu przy wzmożonym obciążeniu, wyprowadzenia masy można połączyć z radiatorem zwiększającym powierzchnię oddawania ciepła.
Jak oceniasz ten wpis blogowy?
Kliknij gwiazdkę, aby go ocenić!
Średnia ocena: 5 / 5. Liczba głosów: 3
Jak dotąd brak głosów! Bądź pierwszą osobą, która oceni ten wpis.








