Spis treści:
PCA9685 to zaawansowany sterownik PWM (z ang. Pulse Width Modulation) produkowany przez NXP Semiconductors, który zyskał uznanie wśród projektantów systemów elektronicznych i hobbystów z powodu swojej uniwersalności oraz łatwości w implementacji. Układ ten znajduje zastosowanie w różnorodnych aplikacjach, włączając robotykę, kontrolę oświetlenia i wiele innych. Wszystko to czyni go jednym z bardziej wszechstronnych komponentów w tej kategorii.
Podstawowe informacje i funkcje PCA9685
Sterownik ma 16 niezależnych kanałów. Każdy z nich można niezależnie programować, co pozwala użytkownikowi na ustawienie dowolnej z 4096 wartości PWM dla każdego kanału. Taka konfiguracja umożliwia precyzyjne sterowanie m.in. serwomechanizmami, gdzie jest potrzebna kontrola kąta i diodami LED, gdzie jest niezbędne kontrolowanie natężenie światła. Wysoka 12-bitowa rozdzielczość pozwala na bardzo płynne przejścia intensywności światła i ruchu. Tak duża czułość jest niezbędna w aplikacjach takich jak profesjonalne oświetlenie sceniczne i precyzyjna robotyka.
Funkcja zdalnego wyłączania pozwala na szybkie dezaktywowanie wszystkich wyjść przez sygnał OE. Ta opcja jest nieoceniona w sytuacjach awaryjnych podczas konserwacji systemu.
PCA9685 może korzystać z wewnętrznego oscylatora lub zewnętrznego źródła zegarowego. Dzięki temu użytkownik może dostosować częstotliwość PWM do specyficznych potrzeb aplikacji. Ponadto możliwość synchronizacji zegara z innymi układami w systemie pozwala na bardziej zintegrowane i efektywne zarządzanie mocą i sygnałami.
Parametry elektryczne sterownika
Napięcie zasilania (VDD) sterownika PCA9685 zawiera się w zakresie od 2,3 V do 5,5 V. Te wartości pozwalają na łatwą integrację z większością współczesnych systemów elektronicznych. Pozostałe parametry elektryczne są następujące.
- Częstotliwość może być ustawiona od bardzo niskich wartości (około 24 Hz) do 1526 Hz. Tak duży zakres daje użytkownikowi możliwość dopasowania urządzenia do wymagań projektowych.
- Każde wyjście PWM jest zdolne do obsługi prądu do 25 mA. Pozwala to na bezpośrednie sterowanie większością diod LED. W przypadku serwomechanizmów zaleca się stosowanie dodatkowych sterowników prądu.
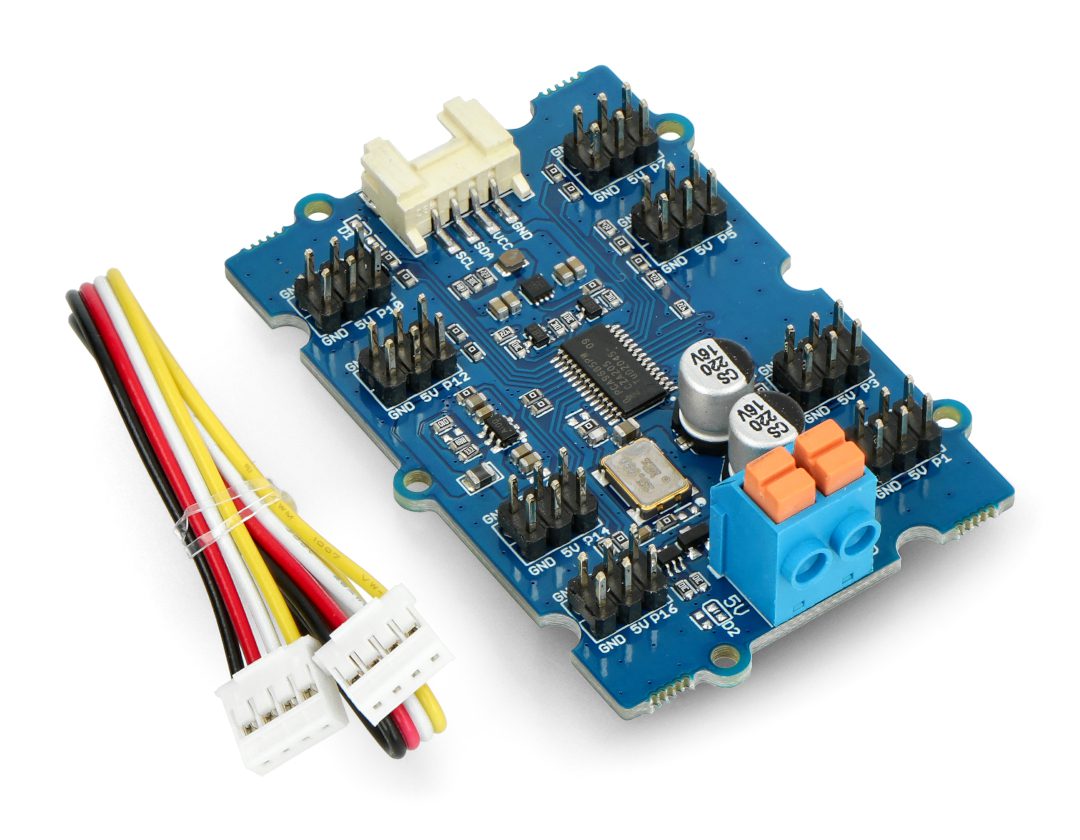
Budowa sterownika PCA9685
Sercem sterownika jest główny układ scalony PCA9685. To centralna część kontrolera, służąca do generowania sygnałów PWM i zarządzania nimi. Pozostałe elementy budowy opisano poniżej.
- PWM PCA9685 ma 16 niezależnych kanałów PWM. Oznacza to, że każdy kanał może sterować jednym urządzeniem.
- Kolejny element to regulator napięcia. Ten podzespół zapewnia stabilne zasilanie dla układu scalonego i podłączonych do niego urządzeń.
- PCA9685 jest sterowany za pomocą interfejsu komunikacyjnego. Na ogół jest to interfejs I2C (z ang. Inter-Integrated Circuit), który umożliwia łatwą komunikację z mikrokontrolerem i innymi urządzeniami.
- Kontroler jest wyposażony w złącza pozwalające na podłączenie zewnętrznych urządzeń, takich jak diody LED, silniki DC i serwomechanizmy.
- Następne elementy to kondensatory wygładzające, które pomagają w stabilizacji zasilania i redukcji szumów, co jest istotne dla precyzyjnego sterowania PWM.
Pozostałe elementy budowy
PCA9685 ma rejestr konfiguracyjny, który pozwala na ustawienie różnych parametrów pracy, takich jak częstotliwość sygnału PWM, tryb pracy czy ustawienia ograniczeń prądowych. Poniżej kolejne elementy budowy.
- Niektóre modele PCA9685 są wyposażone w diody LED wskaźnikowe, które sygnalizują status urządzenia (np. gotowość do pracy, aktywność komunikacji i błędy).
- Poszczególne wersje PCA9685 mają wbudowane zabezpieczenia termiczne i przeciążeniowe. Ich zadaniem jest chronienie kontrolera i podłączonych do niego urządzeń przed uszkodzeniami wynikającymi z przegrzewania lub przeciążenia.
Przykładowe projekty wykorzystujące sterownik PCA9685
PCA9685 jest szeroko stosowany w robotyce ze względu na swoją zdolność do kontrolowania wielu serwomechanizmów z pojedynczego mikrokontrolera. Oto kilka przykładów projektów robotycznych, które mogą wykorzystywać ten sterownik PWM
Robot manipulator
Robot manipulator z wieloma stawami, gdzie każdy staw jest napędzany serwomechanizmem. Zastosowanie PCA9685 umożliwia niezależne sterowanie każdym serwem, umożliwiając precyzyjne ruchy i pozycjonowanie ramienia robota. Sterownik ułatwia programowanie złożonych sekwencji ruchów, poprawia dokładność i powtarzalność operacji.
Robot edukacyjny
Roboty edukacyjne są często używane w szkołach do nauki programowania i robotyki. Zastosowanie PCA9685 do sterowania serwomechanizmami pozwala uczniom eksperymentować z różnymi algorytmami sterowania. Dodatkowo uczniowie mogą łatwo testować wpływ różnych parametrów sterowania na zachowanie robota.
Robot czteronożny (Quadrapod)
Kolejnym projektem jest robot na czterech nogach, który naśladuje chód zwierząt. Zastosowanie PCA9685 obejmuje kontrolowanie serwomechanizmów odpowiedzialnych za ruch każdej nogi. W praktyce oznacza to możliwość wykonania naturalnych i złożonych ruchów. Sterownik ułatwia projektantom tworzenie bardziej zaawansowanych i efektywnych systemów ruchu w robotach.
Zautomatyzowane pojazdy
Następny projekt to robotyczne pojazdy używane w logistyce, magazynach lub jako edukacyjne platformy do nauki autonomii. Zastosowanie PCA9685 obejmuje sterowanie serwomechanizmami dla układu kierowniczego. Pozwala to na precyzyjne sterowanie kierunkiem i ruchem pojazdu, co jest kluczowe w autonomicznych systemach nawigacyjnych.
Roboty interaktywne
Roboty przeznaczone do interakcji z ludźmi są często wykorzystywane w recepcji, obsłudze klienta, czy jako asystenci. Zastosowanie PCA9685 obejmuje kontrolowanie ruchów mechanicznych, takich jak gesty rąk i mimika twarzy. Sterownik umożliwia tworzenie bardziej ekspresyjnych i angażujących robotów, co poprawia ich skuteczność w interakcjach z ludźmi.
PCA9685 to wszechstronny kontroler PWM, który znalazł szerokie zastosowanie w projektach elektronicznych, wymagających precyzyjnego sterowania różnymi urządzeniami. Dzięki zaawansowanym funkcjom i elastyczności jest ceniony przez inżynierów hobbystów i twórców robotyki.
Jak oceniasz ten wpis blogowy?
Kliknij gwiazdkę, aby go ocenić!
Średnia ocena: 5 / 5. Liczba głosów: 1
Jak dotąd brak głosów! Bądź pierwszą osobą, która oceni ten wpis.