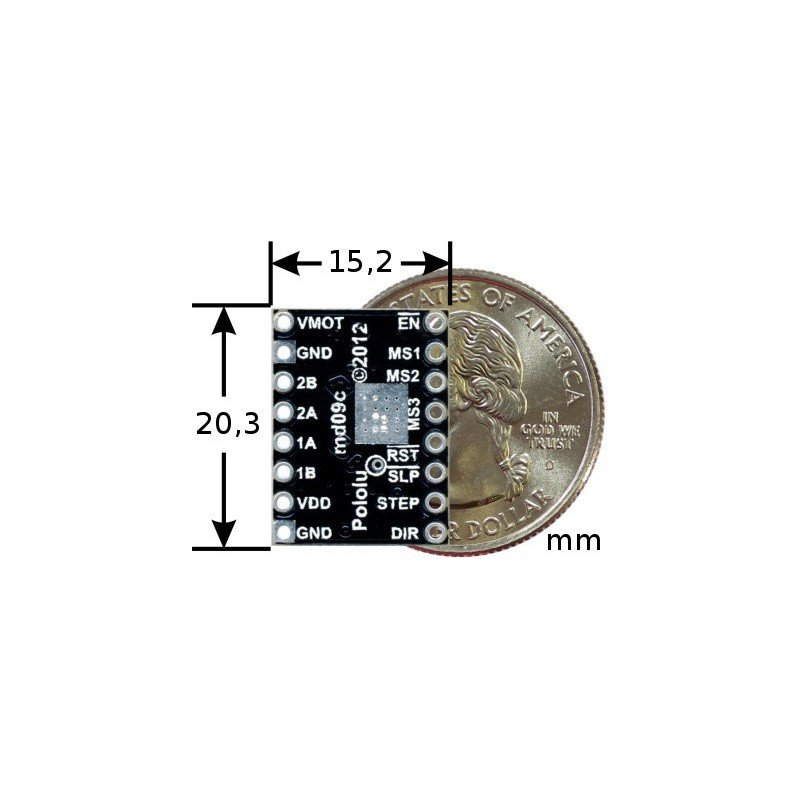









































































































































































































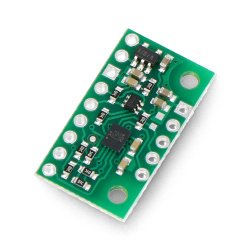



























































































Stepper motor driver based on the A4988 chip. Powered by a voltage range of 8 - 35 V, with a maximum current consumption of 2 A per coil. Maximum resolution: 1/16th of a step. Thanks to a four-layer PCB, the chip can dissipate more heat, which allows a current flow of up to 1.2 A without a heatsink.
The chip allows you to control a stepper motor using a device capable of generating logic states e.g. Arduino, STM32Discovoery, Raspberry Pi folk any microcontroller. The Pololu module is very easy to use. In order to rotate the motor by one step, you need to send a high state (logic one) to the STEP pin, the next sequence of zero and one will move the motor by the next step and so on. The selection of the direction is done by giving the appropriate state to the DIR pin (e.g. low state - clockwise rotation, low state - anticlockwise rotation). The controller also has the ability to select the resolution of motor operation.
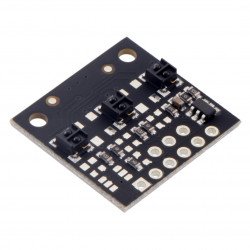
A4988 Black - RepRap 35V/2A stepper motor driver - Pololu 2128.
|
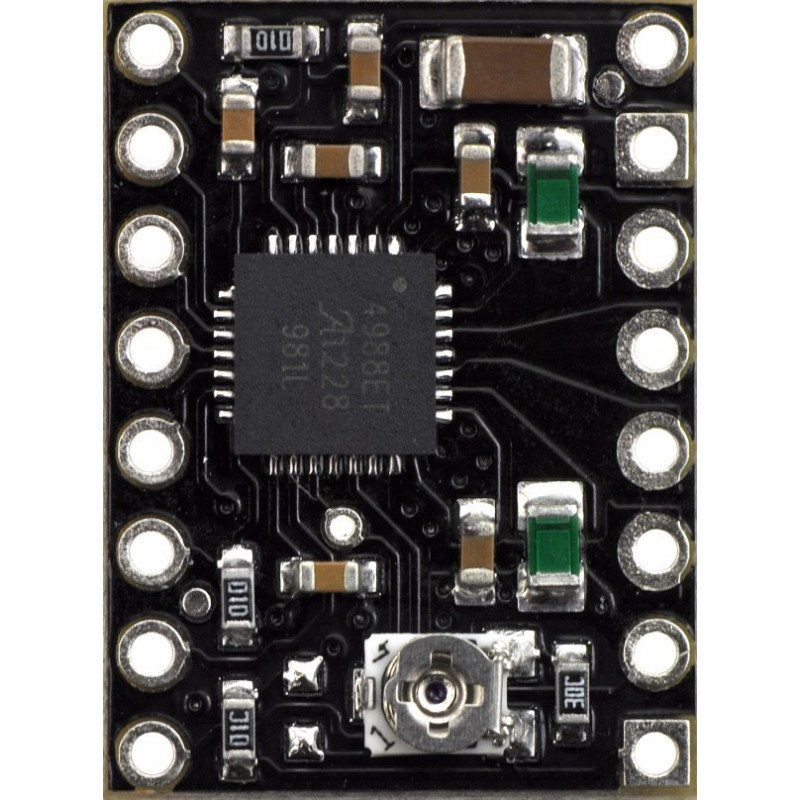
In contrast to the green A4988 module, the black board is made in quad-layer technology, which allows more efficient heat dissipation. This allows the module to deliver 1.2 A per coil without mounting a heat sink. |
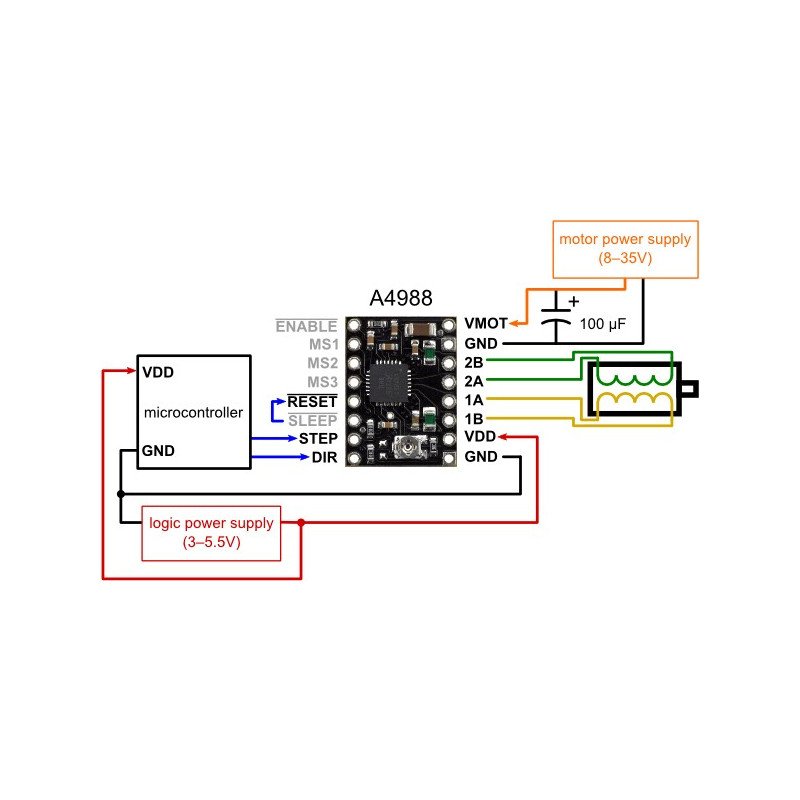
To control a bipolar stepper motor, connect the system according to the drawing below. In case of controlling a unipolar motor, refer to the manual. If the nominal motor voltage is lower than required driver supply (8V), set the current limit manually with a potentiometer.

The figure shows the minimum connection of the controller. The RESET pin is not connected by default, in order to activate the system it must be assigned a high state. This can be done by connecting it with the neighbouring SLEEP pin.
To supply the logic part of the module a voltage from 3 V to 5.5 V is required, which should be connected tothe VDDpin.The motor supply voltage from the range of 8 V to 35 V is applied to the VMOTpin. The circuit can be used to control motors with a nominal voltage lower than the required 8 V. To do this, limit the maximum current draw using the potentiometer, so as not to exceed the allowable motor power.
|
Caution! Connecting and disconnecting the motor while the controller is on may damage the system. |
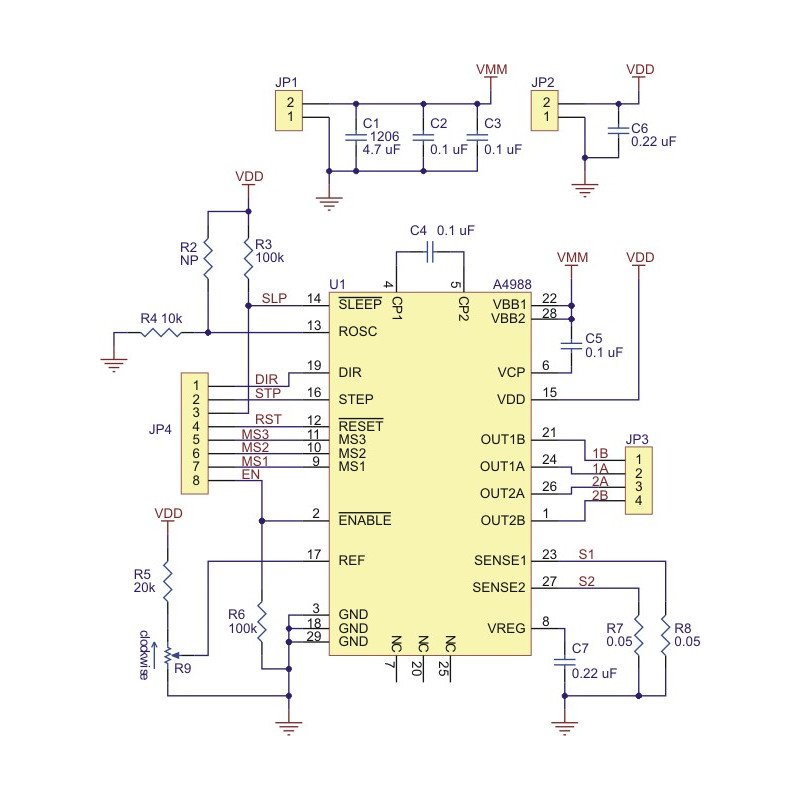
Step size is selected using MS1, MS2, MS3 inputs. The possible settings are shown in the table below. The MS1, MS2 and MS3 inputs have an internal pull-down resistor (100kOm).
| MS1 | MS2 | MS3 | Resolution |
| low | low | low | Full step |
| high | low | low | 1/2 step |
| low | high | low | 1/4 step |
| high | high | low | 1/8 step |
| high | high | high | 1/16th step |
One pulse applied to the STEP pin causes one motor step in the direction selected by applying the appropriate logic state to the DIR pin. STEP and DIR pins are not internally pulled up. If the motor should turn only in one direction, the DIR pin can be permanently connected to VCC or GND.
The circuit has three more inputs to control power consumption: RESET SLP and EN their description is in the documentation. Note that the RESET pin is not connected to anything. If you will not use it, you can connect it to the neighboring SLEEP pin.
The A4988 allows active current limitation with a potentiometer. One of the ways of limiting is setting the controller to full step mode and measuring the current flowing through one coil without providing a signal to the STEP input. The measured current is 70% of the set limit (both coils are always on and limited to 70% in full step mode). Another way is to measure the voltage on REF pin (marked with a circle on the PCB) and calculate the current limit (measuring resistors are 0.05Ω). See the A4988 chip documentation for more details.
The board is designed to dissipate heat at a current consumption of about 1.2 A per coil. If the current will be much higher, you should use an external heatsink for which you can use a thermally conductive glue.
Useful links |
| Package width | 8 cm |
| Package height | 0.3 cm |
| Package depth | 8.5 cm |
| Package weight | 0.003 kg |
Be the first to ask a question about this product!