Spis treści:
Budowa własnych układów elektronicznych to wspaniałe zajęcie. Nie wszystkim z nas jednak wystarcza satysfakcja ze skonstruowania urządzenia. Pojawia się chęć, aby konstrukcję „ożywić” – sprawić, by zyskały choćby pewien zakres autonomii i mogły (przynajmniej w części samodzielnie) realizować powierzone im zadania. Stąd prosta droga do robotów mobilnych sterowanych inteligentnymi algorytmami, a nawet konstrukcji uczących się. Nawet zbudowanie robota może okazać się nie dość emocjonujące – prawdziwa adrenalina pojawia się dopiero, gdy nasz własny robot rozpoczyna rywalizację z innymi, podobnymi konstrukcjami. Z tej idei narodziły się walki robotów. Pozwalają one przenieść na grunt pasji elektronicznej emocje, które towarzyszą prawdziwym zawodom sportowym lub grom on-line.
Popularność walk robotów
Co sprawia, że rywalizacja robotycznych zawodników zyskała rzesze fanów na całym świecie? Przyczyn może być kilka. Pierwsza z nich to egalitarność – zawody są dostępne tak naprawdę dla wszystkich, a społeczność miłośników walk robotów jest niezwykle otwarta. Na zawodach spotkać można zarówno kilkulatków, jak i młodzież ze szkół średnich, ale też studentów oraz zawodników w wieku dojrzałym. Rywalizacja staje się dla nich również okazją do towarzyskiego spotkania z osobami zainteresowanymi tą samą dziedziną robotyki, a jednocześnie dostarcza ogromnych emocji. Myliłby się jednak ten, kto uważałby np. budowę robotów mini sumo wyłącznie za formę rozrywki. Na uczelniach technicznych działają bowiem całe koła naukowe, skoncentrowane właśnie na konstruowaniu małych, mobilnych urządzeń. Swoje drużyny w zawodach wystawiają m.in. Politechnika Warszawska, Wrocławska, Uniwersytet Mikołaja Kopernika w Toruniu czy też Akademia Górniczo-Hutnicza w Krakowie. Wnioski z eksperymentów stanowią doskonałą bazę do poważnej dyskusji o inteligentnych algorytmach, ponieważ doświadczenia zebrane w toku prac konstrukcyjnych stanowią bezcenne źródło wiedzy zarówno o algorytmach sterowania, jak i uczenia się, a także o materiałoznawstwie i projektowaniu napędów.

Na popularność zawodów robotycznych wpływa łatwość konstruowania elektronicznych „zawodników”. Dla wielu młodych ludzi mobilny robot staje się pierwszym samodzielnie zbudowanym urządzeniem. Do montażu wykorzystać można elementy powszechnie dostępne – takie jak klocki czy kółka z zabawkowych samochodzików, choć przy obecnej popularności akcesoriów dla modelarzy „wydłubywanie” części ze starych zabawek nie jest już dziś konieczne. W dawnych numerach czasopism elektronicznych można było znaleźć jednak i takie rozwiązania, jak małe, mobilne roboty montowane na… płytach CD pełniących rolę platformy montażowej. Również sam schemat układu nie jest już dziś tajemnicą – w dobie wielu kursów i tutoriali, a także baz z gotowymi schematami budowa staje się naprawdę łatwa i wymaga raczej chęci niż doświadczenia. Warto zauważyć natomiast, że konstruowanie i samodzielne udoskonalanie np. robota minisumo to motywująca szkoła elektroniki. Nic nie motywuje do dalszej nauki tak skutecznie, jak świadomość, że nasz własny robot mobilny może stanąć do rywalizacji z innym robotem.
Minisumo – najpopularniejsza klasa robotów do walk
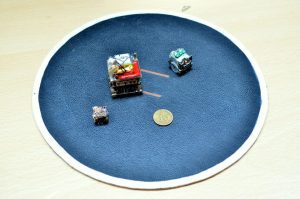
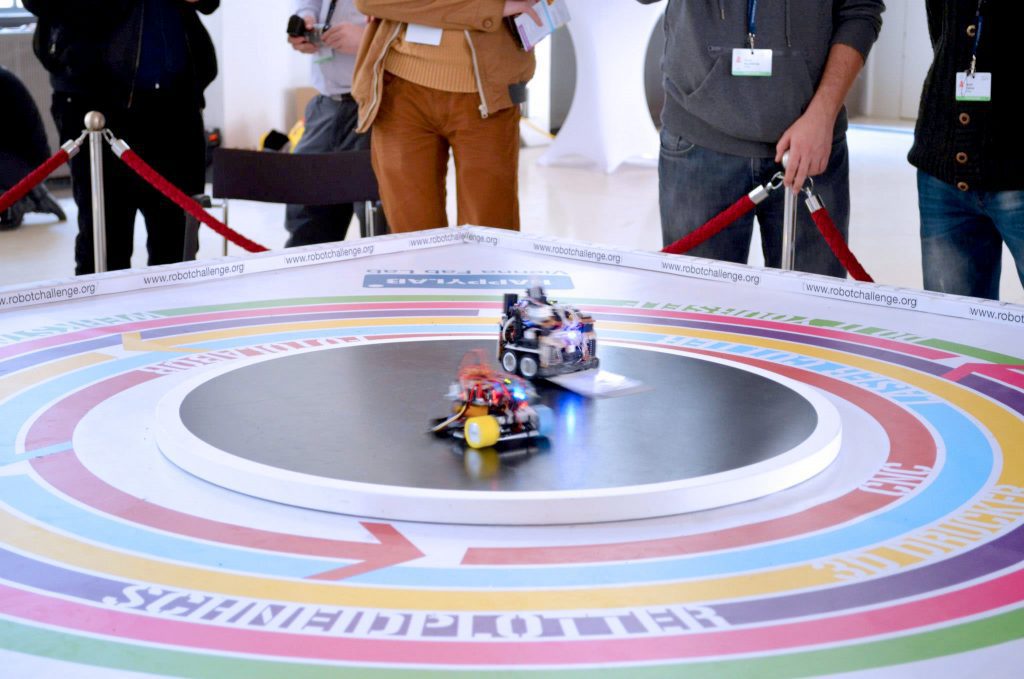
Podobnie jak każda inna dyscyplina sportu, tak i walki robotów rozwinęły się, tworząc wiele specjalistycznych kategorii. Najpopularniejszą jest jednak nadal minisumo. Są to zawody robotyczne, w których dwa autonomiczne roboty spotykają się na ringu, zwanym z japońskiego „dojo”. Ring ma średnicę 77 cm i otoczony jest szerokim na 2,5 cm białym obrysem. Miejsce startu robotycznych zawodników wyznaczają dwie, krótkie, równoległe kreski, znajdujące się w centralnej części okręgu. Sam robot natomiast musi być w pełni mobilny, jego wymiary nie mogą przekroczyć 10 x 10 cm, a waga – 0,5 kg. Podczas zawodów robot minisumo ma wypchnąć przeciwnika poza obrys dojo, ale nie może przy tym używać żadnych elementów, które dezorientowałyby czujniki przeciwnika albo też fizycznie uniemożliwiałyby mu poruszanie się. Jedna runda trwa 3 minuty, a zawody składają się z kilku (najczęściej trzech) takich rund. Ważne, by mobilni zawodnicy nie rozpoczynali działań natychmiast po rozpoczęciu rundy – najczęściej stosowana jest co najmniej kilkusekundowa, obowiązkowa pauza.
Inne rodzaje robotów sumo
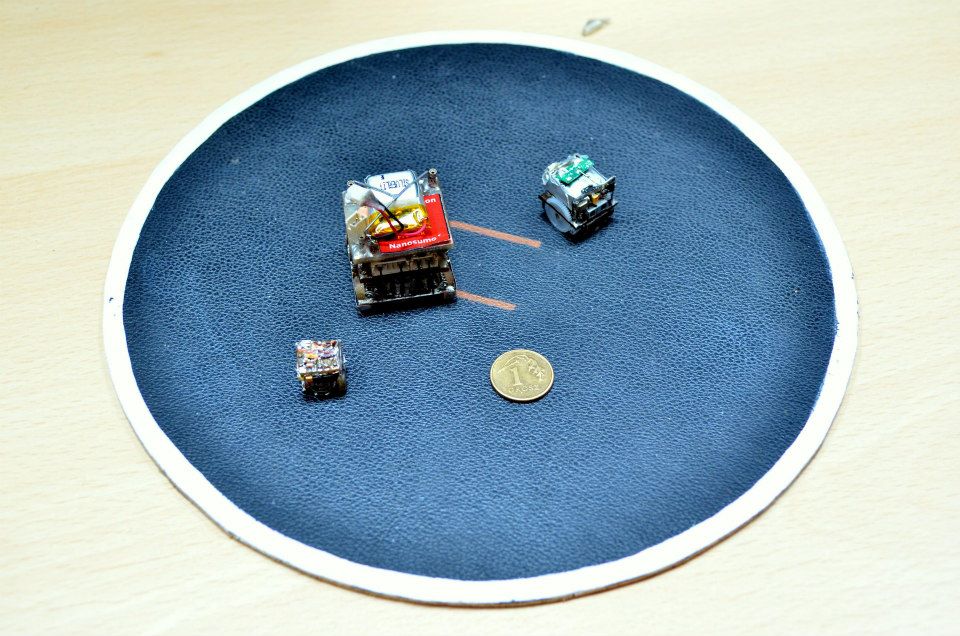
Bardzo podobne do opisanych wcześniej zasady rządzą rozgrywkami robotów sumo z innych kategorii „wagowych”. Zasadnicza różnica sprowadza się tu właściwie do wymiarów samych robotów oraz (w niektórych przypadkach) także dojo. Największe roboty – sumo i megasumo – nie mogą przekroczyć wymiarów 20×20 cm oraz wagi 3 kg. Co ważne – w przypadku sumo i minisumo nie ma górnej granicy wysokości robota, choć narzuca ją sama fizyka, bowiem im wyższa konstrukcja, tym większe ryzyko jej przewrócenia. Mniejsze urządzenia – microsumo – nie mogą przekroczyć rozmiarów kostki 5 x 5 x 5 cm i wagi 100 g. Jeszcze mniejsze – nanosumo – muszą zmieścić się w wymiarach o połowę mniejszych i wadze nieprzekraczającej zaledwie 25 g! Oczywiście pomniejszenie wymiarów stanowi dodatkową trudność dla konstruktorów, którzy muszą wymyślić i zaprojektować urządzenie o jak najlepszej przyczepności, z wykorzystaniem miniaturowych silników, kół, czujników – tak by całość po zmontowaniu nie przekroczyła wagi np. 25 g (dla porównania: waga pudełka zapałek z zawartością osiąga na ogół ok. 10 g).
Analizując różne kategorie robotów sumo wspomnieć należy także o kategorii Humanoid Sumo. Są to, jak sama nazwa wskazuje, urządzenia naśladujące formę postaci. W klasycznym wariancie rozgrywek do rywalizacji dopuszczane są roboty o „wzroście” maksymalnie 50 cm i pozostałych wymiarach (szerokość, długość) po 20 cm, a ich waga nie może przekroczyć 3 kg. Natomiast wśród młodszych konstruktorów popularnością cieszą się także zawody LEGO sumo, których obudowa montowana jest z popularnych klocków. Ich wymiary nie mogą przekroczyć 15 x 15 cm, a waga musi zmieścić się w 1 kg.
Jak wygrać zawody robotów sumo?
Jeśli do rywalizacji stają nawet zespoły uczelni wyższych, walka o podium na zawodach robotów sumo staje się ogromnym wyzwaniem i to w każdej ze wspomnianych kategorii. Regulamin określa jasno, że urządzeniom mobilnym na ringu nie wolno w żaden sposób uszkadzać konstrukcji przeciwnika – wykluczone jest strzelanie, podpalanie, rozsypywanie jakichkolwiek substancji czy też oblewanie nimi rywala. Walka nie polega bowiem na zniszczeniu czujników drugiego z robotów na ringu, tylko na pokonanie go siłą i sprytem. Nie wolno również uszkadzać powierzchni dojo, zatem konstruktorzy powinni zadbać, aby koła (i wszystkie inne elementy, takie jak pług) uzyskiwały odpowiednią przyczepność bez zarysowania powierzchni ringu. A gdyby któryś z uczestników wpadł na pomysł zapewnienia swojemu robotowi sumo lepszej przyczepności dzięki posmarowaniu kół lepką substancją, zostanie zdyskwalifikowany. Oprócz standardowego ważenia każdy z mobilnych „zawodników” przechodzi bowiem także tzw. „test kartki”. Polega on na ustawieniu robota na czystej kartce. Następnie konstrukcję podnosi się do góry. Kartka powinna pozostać nienaruszona – jeśli unosi się, przyczepiona do kół, robot nie może wziąć udziału w rozgrywkach.
Taktyka zwycięskich konstrukcji zależy oczywiście od wyobraźni projektanta, ale jest przy tym wypadkową znakomitej znajomości optyki i mechaniki, wiedzy o materiałach, doświadczenia elektronicznego i programistycznego. Kształt prostokąta lub koła nie jest obowiązkowy, ale praktyka podpowiada, że wysoki robot będzie bardziej podatny na przewracanie się, a zbyt lekki zostanie łatwiej zepchnięty z ringu przez cięższego przeciwnika.
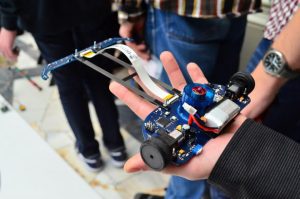
O sukcesie konstrukcji decyduje przede wszystkim przyczepność kół – warto zadbać o to, by były odpowiednio ogumione (z zastrzeżeniem wspomnianego wcześniej „testu kartki” – opony nie mogą się lepić). Dobrze sprawdzają się tu np. modelarskie koła poliuretanowe. Drugi wymóg to niski profil robota. Konstrukcja powinna trzymać się podłoża i jak najściślej do niego przylegać, ponieważ przeciwnik może podjąć próbę podważenia naszego robota przy pomocy pługu. Pole do popisu zyskują zatem w robotach mini sumo wszelkie niskie, opływowe konstrukcje o szerokim spodzie. Taka obudowa utrudnia podbicie przy pomocy łopatki, a jeśli nawet przeciwnikowi taka sztuka na chwilę się uda, to nasz robot łatwiej powróci do właściwego położenia. Tak, jak wspomnieliśmy wcześniej, opłacalne jest zawsze maksymalne wykorzystanie dopuszczalnej masy – trzeba jednak zadbać także o jej stabilne rozłożenie, co również wpływa korzystnie na stabilność całego urządzenia.
Kolejną ważną kwestią jest optymalne dobranie stosunku prędkości robota do momentu obrotowego silników. Tu przyda się zgłębianie oferty produktów silników modelarskich, która jest obecnie niezwykle szeroka. Pamiętajmy także o wydajnym zasilaniu – nasz robot musi przetrwać wszystkie rundy rozgrywane w regulaminowym czasie! Znalezienie ogniwa odpowiednio lekkiego, a jednocześnie trwałego to kolejne wyzwanie dla projektanta robota typu minisumo. Natomiast w celu skutecznego atakowania przeciwnika musisz wyposażyć swoją konstrukcję w szybkie i niezawodne czujniki odbiciowe (pamiętaj, że reakcja robota musi być automatyczna – nie masz możliwości wspierania go poprzez zdalne sterowanie; wyjątkiem są tu jedynie zawody Humanoid Sumo). Pamiętaj także o pługu – to kluczowy element konstrukcji, który musi przez cały czas utrzymywać się blisko podłoża. Ta montowana na robocie łopatka ma na celu podważenie przeciwnika w celu łatwiejszego zepchnięcia go z ringu.
Linefollower, czyli popis inteligencji w nieznanym środowisku
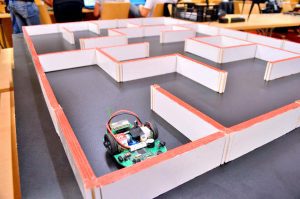
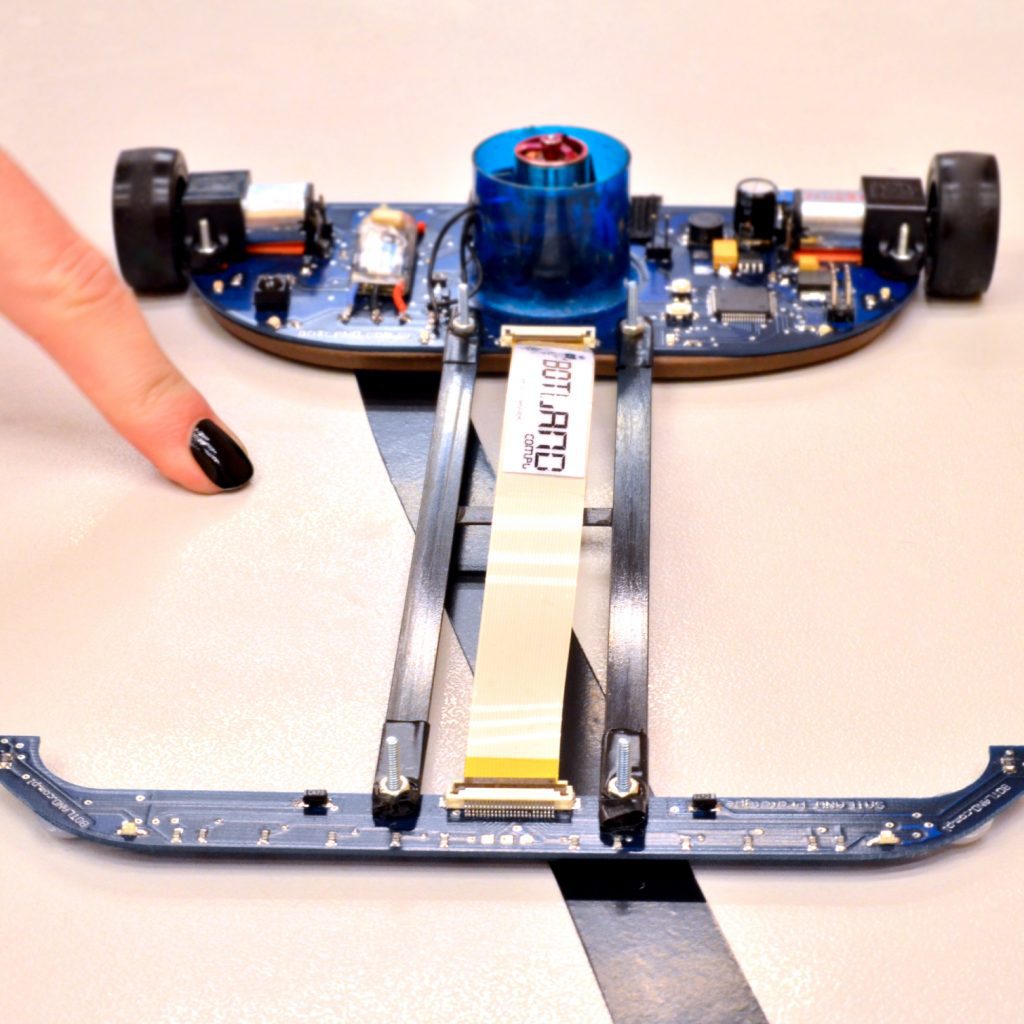
Obok zawodów minisumo (i pozostałych kategorii sumo) bardzo często spotykane są także rozgrywki linefollowerów. Roboty te wyposażone są w funkcję śledzenia narysowanej na podłożu trasy (najczęściej w postaci czarnej linii na białym tle). Przebieg trasy bywa zróżnicowany, mogą pojawiać się na niej różnego rodzaju utrudnienia w postaci przerw, zakrzywień, ostrych kątów itp. Organizatorzy zawodów wskazują często w specyfikacji podstawowe kryteria konstrukcji trasy, aby projektanci mogli przystosować swoje linefollowery do określonych wymogów. Trudność przejazdu może dotyczyć zresztą nie tylko linii wyznaczonej na podłożu, ale nawet ukształtowania samego podłoża – zdarzają się bowiem trasy z różnego rodzaju fizycznymi przeszkodami, takimi jak ukośne podjazdy czy też zakrzywienie (wygięcie) toru jazdy w sposób zbliżony do torów saneczkarskich.
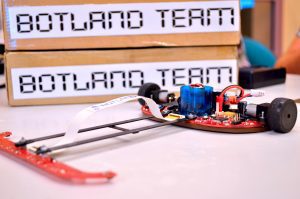
Zawody linefollowerów polegają na jak najszybszym i – co ważne – bezbłędnym pokonywaniu trasy z ominięciem znajdujących się na niej pułapek. W rywalizacji brany jest pod uwagę czas przejazdu. Zarówno ogólna zasada, jak i wymogi dotyczące samych robotów sprawiają, że forma linefollowerów upodabnia się często do kształtu aut wyścigowych albo… owadów. Wszelkie inspiracje są tu cenne, ponieważ regulamin nie narzuca żadnych konkretnych rozwiązań w tej materii. Jedyny wymóg dotyczy ogólnych wymiarów urządzenia – nie powinny one przekraczać rozmiaru kartki A4.
Jak wygrać zawody robotów linefollower?
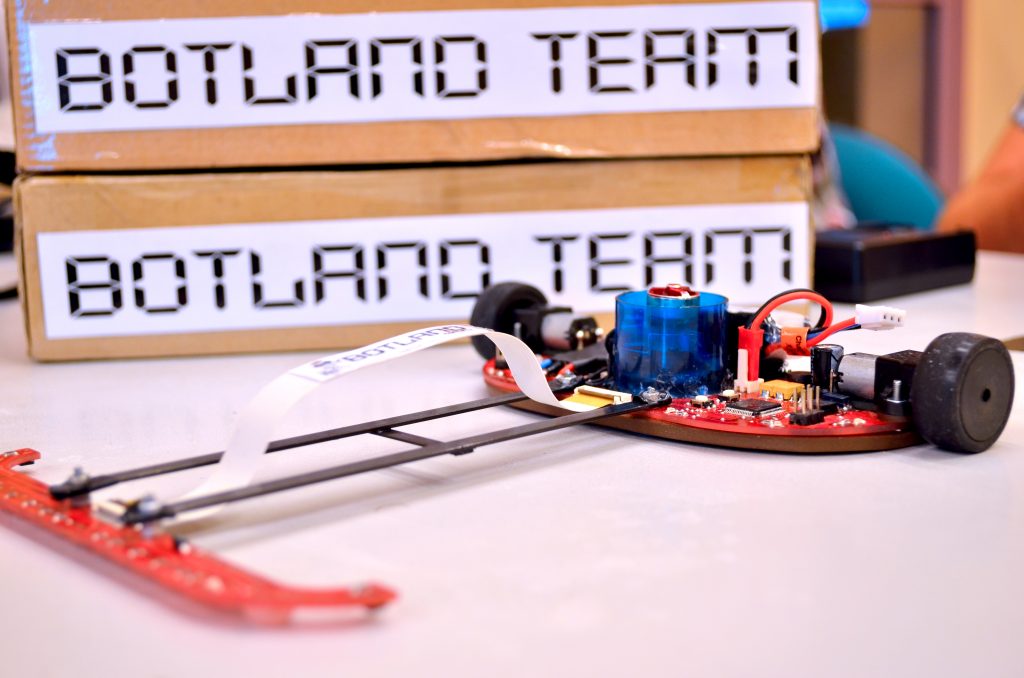
Przepis na sukces robota typu linefollower w zawodach to przede wszystkim możliwie jak najniższa masa, która zmniejszy skłonność konstrukcji do przewracania się. Z tego samego powodu wskazany jest płaski profil obudowy – robot powinien jak najlepiej przylegać do toru. Konstrukcję wyposaża się w koła o wysokiej przyczepności do podłoża. W celu skutecznego pokonywania przeszkód i planowania przejazdu, w linefollowerach montuje się wysunięte elementy (wąsy) z oczujnikowaniem. Niejako wyprzedzają one przejazd samego robota i pozwalają mu łatwiej orientować się w dalszym przebiegu toru – ich funkcja jest zatem zbliżona do czułków owadów. Niektóre roboty posiadają także napędy tunelowe, zasysające powietrze pod podwoziem konstrukcji. Efektem takich rozwiązań jest poprawa przyczepności do podłoża bez zwiększania masy robota, a także ułatwienie pokonywania wszelkich krzywizn. Pamiętaj jednak, że roboty z napędem tunelowym dopuszczane są tylko do niektórych kategorii rozgrywek.
Inne walki robotów
W miarę rozwoju robotyki amatorskiej świat pasjonatów elektroniki wzbogaca się także o inne kategorie robotycznych zawodów. Drużyny elektronicznych zawodników rozgrywają mecze piłki nożnej, choć obecnie czynią to jeszcze dość nieporadnie. Jak głosi wieść z branży, dla specjalistów jest jednak oczywiste, że nadejdzie dzień, w którym humanoidy będą rywalizować z ludźmi w prawdziwych rozgrywkach piłkarskich – i to z sukcesem. Ma stać się to już w połowie XXI wieku. Co ciekawe, zawody RoboCup odbywają się już od ponad 20 lat, a obecnie międzynarodowe zawody obejmują cały szereg dyscyplin, nie tylko piłkarskich zresztą. Rozgrywane są bowiem także konkursy robotów ratowniczych czy też… tańczących.
Opisane na początku tego artykułu zawody minisumo (i pozostałych kategorii robotów sumo) to rywalizacja odbywająca się według zasad fair play. Jednak nie wszystkie robotyczne zawody są tak przyjazne. Od kilku lat w Stanach Zjednoczonych organizowane są bowiem rozgrywki polegające na… fizycznym niszczeniu przeciwnika. Rywalizacja jest brutalna, a mobilne konstrukcje sięgają po broń, która ma unicestwić konkurenta – dozwolone jest zatem cięcie, rozbijanie, polewanie, posypywanie i rozszarpywanie. Po zakończonej rozgrywce roboty są oczywiście mocno pouszkadzane, bowiem walkę kończy dopiero całkowite unieszkodliwienie rywala. Również wielkość startujących do pojedynku konstrukcji znacznie różni się od delikatnych minisumo – te roboty są bowiem ciężkie i bardzo masywne.
Przyglądając się zawodom elektronicznych sportowców trudno pominąć prawdziwe perełki z branży robotycznej, takie jak walki zdalnie sterowanych humanoidów. Bardzo duże możliwości sterowania – w tym zachęcenie robota do kopniaków, podskoków, przysiadów, ciosów wymierzonych w przeciwnika – czynią tego typu rywalizację bardzo zbliżoną do gier komputerowych. Rozgrywka jest wciągająca i efektowna zarówno dla samych uczestników (właścicieli robotów), jak i widzów. Przy dużej wprawie można doprowadzić technikę pojedynku do perfekcji. Oczywiście tego typu roboty trudno byłoby zbudować we własnym zakresie, dlatego rywalizacja prowadzona jest często w oparciu o gotowe, humanoidalne roboty, dostępne w ofercie handlowej.
Podsumowanie
Uczestnictwo w walkach robotów – zarówno tych budowanych samodzielnie, jak i tych gotowych, dostępnych w ofercie producentów elektronicznych zabawek – to hobby idealne dla pasjonatów w różnym wieku i o różnym stopniu zainteresowania. Samodzielne projektowanie rozwija wyobraźnię, intuicję w zakresie fizyki czy też elektroniki i programowania. Poddawanie robota najtrudniejszym testom – w starciu z urządzeniami konkurencyjnymi – sprawia, że ten sam model np. minisumo można rozwijać i udoskonalać przez szereg kolejnych lat, doprowadzając go do perfekcji.
Zachęcamy Cię do prześledzenia sprawozdań choćby z polskich zawodów robotycznych i przekonania się, czy właśnie takie sportowe podejście do elektroniki nie stanie się przypadkiem również Twoją największą pasją!
Jak oceniasz ten wpis blogowy?
Kliknij gwiazdkę, aby go ocenić!
Średnia ocena: 4.4 / 5. Liczba głosów: 10
Jak dotąd brak głosów! Bądź pierwszą osobą, która oceni ten wpis.










