Spis treści:
Krótka historia robotyki
Robotyka to dziedzina poruszająca bardzo wiele zagadnień. Wiąże się z projektowaniem, programowaniem, budowaniem i dokonywaniem pomiarów. Jako dziedzina wiedzy robotyka wymaga połączenia światów mechaniki, automatyki, informatyki, matematyki oraz elektroniki. Praktyczne zastosowania robotyki wydają się nie mieć granic, ponieważ współcześnie niemal wszystko może ulegać robotyzacji, czyli zastępowaniu pracy ludzkiej pracą robotów – oczywiście mogą to być również takie procesy, które w wyniku robotyzacji wymagają jedynie ograniczonego udziału człowieka.
Fascynujące jest to, iż temat który rozwinął się w tak ogromnej skali, pozostał stuprocentowo wierny swym początkowym założeniom. Nawet słowo „robot” narodziło się ze słowiańskiego „robota”, czyli wysiłek, trud, praca. Czym miały być fikcyjne roboty wymyślone przez czeskiego pisarza? Tworami, którym nie brakuje niczego, co posiada człowiek mający wykonywać jakąś pracę. Innymi słowy roboty miały wyręczać ludzi od wykonywania różnych czynności, na które było zapotrzebowanie. W sztuce R.U.R. (autor: Karel Capek) przypominały raczej androidy, lecz gdy skupimy się na samym znaczeniu przypisywanym robotom, zauważymy, że faktycznie powstają one w celach realizowania zadań, które niegdyś były przypisywane ludzkim robotnikom. Ogromny wkład w popularyzację pojęć takich jak „robot” i „robotyka” miał również Isaac Asimov, który jest także autorem popularnych trzech praw robotyki.
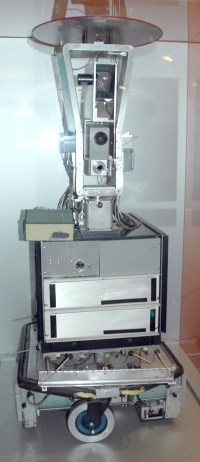
Ciekawym przykładem z rzeczywistości będzie Shakey z SRI: Instytut Badań w Stanford, nad którym pracowano w latach 1966 – 1972. Jest uznawany za jednego z pierwszych mobilnych robotów. Wyróżniał się zdolnością do przemieszczania i korzystania z prostych mechanizmów przetwarzania obrazów. To urządzenie było zdolne do analizowania swojego otoczenia i planowania umożliwiającego wykonywanie otrzymanych zadań. Shakey mógł się przemieszczać z jednego punktu do drugiego, przełączać włączniki światła, otwierać i zamykać drzwi, przesuwać różne obiekty. Robot mógł na przykład otrzymać zadanie „zepchnij obiekt z platformy” i w tym celu zacząłby badać otoczenie, zidentyfikowałby platformę z obiektem, wjechałby na nią po rampie, a następnie zepchnąłby z niej obiekt.
Właśnie dlatego robotyka jest ściśle powiązana z programowaniem i rozwojem sztucznej inteligencji. Zaawansowane algorytmy sprawiają, że roboty mogą wykorzystywać czujniki do uzyskiwania informacji na temat swojego otoczenia i dokonywać jego analizy, co jest kluczowe w autonomicznym realizowaniu bardziej złożonych zadań. Warto zwrócić uwagę na różnice pomiędzy zaprogramowaniem zamkniętej sekwencji ruchów, które następnie są po prostu wykonywane, a zdolnością do obsługi czujników zewnętrznych i związaną z tym możliwością wykonywania znacznie bardziej złożonych czynności, ponieważ jest to istotna część rozwoju robotyki.
Współcześnie istnieje wiele rodzajów klasyfikacji robotów. Oceniając temat przez pryzmat sterowania (także poziom inteligencji), podzielimy je na roboty sekwencyjne, roboty realizujące zadane trajektorie, roboty adaptacyjne, teleportatory (zdalne sterowanie), a także roboty inteligentne, którym zleca się czynności bez programowania faz wykonania zadania. Dzięki temu że mają liczne sensory, mogą dokonywać detekcji zmian w warunkach pracy, a także adaptować pracę do środowiska, w którym pojawiły się zmiany. Są roboty stacjonarne i mobilne; monolityczne, modułowe, pseudomodułowe; są roboty o napędzie pneumatycznym, hydraulicznym, elektrycznym czy mieszanym.
Budowanie robotów napędza rozwój współczesnego świata i temat jest niezwykle głęboki. Świadomość tego faktu jest ważna, lecz nie będziemy brnąć dalej w historię, klasyfikację czy najnowsze osiągnięcia. Chcemy zostać młodymi robotykami, dlatego przejdziemy do podstaw i zastanowimy się jakie narzędzia będą idealne na początek przygody z budowaniem podstawowych jednostek.
Jakich narzędzi potrzebuje początkujący robotyk?
Bez pewnych rzeczy po prostu nie można się obyć, dlatego warto omówić temat podstawowych narzędzi, niezbędnych do budowania pierwszych robotów. Na początek kwestia lutownicy. Można wybierać spośród kilku rodzajów, co omówimy odrobinę dokładniej.
Lutownica transformatorowa opiera swoje działanie na tym, że przez drut przepływa prąd o dużym natężeniu. Nie da się ukryć, że jest to powszechnie wykorzystywane, popularne urządzenie, które ma kilka zalet. Takie lutownice nie są drogie i charakteryzują się krótkim czasem nagrzewania grota. Mają także wady, ponieważ niedostateczne doświadczenie użytkownika w połączeniu z maksymalną temperaturą pracy takich lutownic, mogą być efektem przegrzania lutowanych elementów. Ponadto nie każdemu będzie łatwo pracować ze stosunkowo dużym ciężarem, a wykonywania zadań nie ułatwi także silne pole elektromagnetyczne wokół grota.

Lutownica kolbowa to podtyp lutownic grzałkowych. Ciepło jest wytwarzane za sprawą wbudowanej grzałki. W tym wypadku waga jest mniejsza niż w przypadku lutownicy transformatorowej, a kształt jest bardzo wygodny do pracy. Cena również potrafi być bardzo ekonomiczna. Grot jest wykonany z masywnego kawałka metalu i z reguły jest wymienny. Lutownice transformatorowe można uznać za te bardziej uniwersalne, natomiast kolbowe jako doskonałe do bardziej precyzyjnych prac, do lutowania mniejszych elementów.

Stacja lutownicza kolbowa może się okazać trochę mniej ekonomicznym rozwiązaniem pod względem ceny, lecz jest to bardzo dobry wybór, umożliwiający komfortową pracę z niemal każdym elementem elektronicznym. Niektórych może zainteresować także stacja lutownicza na gorące powietrze (hot-air), co krótko mówiąc nie będzie dobrym wyborem dla osób stawiających pierwsze kroki w projektowaniu i budowaniu robotów. Ceny są wyższe niż w przypadku wcześniej omawianych lutownic, a użytkownik powinien wykazać się odpowiednim obyciem z takimi urządzeniami.

Odsysacz do cyny jest niezbędny podczas lutowania, ponieważ zawsze popełni się jakieś błędy, które będzie trzeba poprawić. Jest to nic innego jak metalowa tuba z tłokiem i sprężyną. Umożliwia odsysanie nadmiaru roztopionej cyny. Wystarczy przyłożyć końcówkę do punktu, w którym znajduje się roztopione lutowie, a następnie zwolnić sprężynę. Wytworzone podciśnienie wciągnie cynę do wnętrza odsysacza. Jest to narzędzie o prostej budowie, jednak jeśli ktoś chciałby większej finezji, istnieją też odsysacze elektryczne. To połączenie lutownicy i odsysacza. Gorąca końcówka pozwala na wylutowywanie elementów elektronicznych z płytek. Wykorzystywanie jednej ręki do takich zadań może być pewnym ułatwieniem, lecz nie jest to niezbędne do udanej pracy. Zwykły odsysacz lutowia również z powodzeniem spełni swoją funkcję.
Miernik uniwersalny określany również multimetrem, to urządzenie umożliwiające łatwe sprawdzanie natężenia, napięcia czy oporu elektrycznego w obwodzie. Warto mieć to pod ręką, gdy np. zaistnieje potrzeba zmierzenia rezystancji opornika, spadku napięcia na danym podzespole, odnalezienia zwarć. Takie mierniki uniwersalne mają wyświetlacze, które zawsze pozwalają na szybki odczyt pomiaru. Są wygodne w obsłudze, a jeżeli jesteśmy początkującymi robotykami, dopiero uczącymi się wszystkich podstaw, wtedy ucieszy nas fakt, iż multimetr można kupić już za bardzo małe pieniądze. Trudno jest przecenić przydatność tego narzędzia pomiarowego, ponieważ sprawdzimy nim połączenia na płytce PCB, dowiemy się w jakim stopniu akumulator został rozładowany, jaki prąd pobiera silnik… Po prostu trzeba je mieć, jeżeli chcemy zainteresować się budowaniem robotów.

Miniwiertarka jest niezbędna do wykonywania wielu prac technicznych. To idealne narzędzie do zajęć związanych zarówno z elektroniką, jak i chociażby modelarstwem. Wszystko sprowadza się do wygody, precyzji, a także uniwersalności. Co mamy na myśli pisząc, że jest to niezwykle uniwersalne narzędzie? Wystarczą wymienne końcówki, żeby móc zajmować się szlifowaniem, frezowaniem, cięciem, a także wierceniem. Projektowanie i budowanie robotów będzie się wiązało z chwilami, gdy przyjdzie nam np. powiększyć otwór w płytce PCB albo wyciąć odpowiedni kształt w platformie, do której będziemy mocować elementy. Te i wiele innych zadań zrealizujemy właśnie przy pomocy miniwiertarki, która na początek nie musi być drogim modelem. To idealny moment, żeby przejść do krótkiej wzmianki o akcesoriach ochronnych.
Okulary ochronne to niedrogi dodatek do warsztatu młodego robotyka. Pozwolą zapobiec potencjalnie niebezpiecznym wypadkom, przez które można nieodwracalnie uszkodzić swój wzrok. Elektronarzędzia wykorzystywane podczas różnych prac przy budowaniu robotów, powinny wiązać się z zasadą pod tytułem: zawsze dbamy o bezpieczeństwo. Odłamki, pył, różnego rodzaju wióry, te i inne obce ciała nigdy nie powinny trafić do oczu – w tym celu należy wyposażyć się w okulary ochronne.
Co składa się na proste roboty? Z czego je budować?
Zasilanie
Młody robotyk do zasilania zbudowanych układów z reguły wybiera baterie. Ogólna dostępność i niskie koszty zdecydowanie za tym przemawiają. Oczywiście bardziej ekologicznym rozwiązaniem są akumulatorki, które pozwolą także na oszczędności finansowe – na dłuższą metę regularne ładowanie wygrywa w zestawieniu z koniecznością kupowania nowych baterii. To dobry moment aby wspomnieć o stabilizatorze, którego zadaniem jest niwelowanie spadków napięcia, dzięki czemu do podzespołów dotrze napięcie bez zmian. Ma to związek z wahaniami napięcia, które mogą występować z różnych powodów. Nawet stopniowe rozładowanie baterii wiąże się ze spadkiem napięcia. Podsumowując, stabilizator jest układem, który napięcie wejściowe przekształca w stabilne napięcie wyjściowe.
Mikrokontrolery
Jeżeli robot ma być zdalnie sterowany, wtedy może on być wykonany bez układów sterujących. Co jeśli preferujemy aby nasz robot miał większy stopień autonomii i nie wymagał zdalnego sterowania ze strony operatora? Możemy zdecydować się na wykorzystanie mikrokontrolerów, czyli zminiaturyzowanych jednostek kontrolujących. Zawierają w sobie jednostkę centralną (CPU), pamięć RAM, rozbudowane układy wejścia i wyjścia, a z reguły także pamięć programu. Taki niezależny system mikroprocesorowy to mówiąc w ogólnym uproszczeniu malutki komputer. My jako twórcy robota będziemy mogli zaprogramować, a następnie zapisywać sekwencje instrukcji w pamięci mikrokontrolera, żeby później mogły być wykonywane. W tym celu będziemy potrzebować również odpowiedniego programatora.
Czujniki
Czujniki umożliwią pomiary różnych parametrów związanych zarówno z otoczeniem, jak i ze stanem robota. Tak jak było to wspomniane podczas wzmianki o robocie Shakey, czujniki dają robotowi możliwość rozpoznawania określonych obiektów, zrozumienia otoczenia i realizowania przekazanych zadań. Innymi słowy zespół czujników to „oczy i uszy” robota. Dzięki nim można uzyskać znacznie ciekawsze i bardziej zaawansowane funkcje.
Napęd
Większość osób widziała słynne filmiki z robotami firmy Boston Dynamics. Są imponujące i potrafią rozbudzić wyobraźnię. Roboty te potrafią chodzić niemal z taką samą sprawnością jak człowiek, a czasem wydaje się, że ich zdolności ruchowe przerastają niektórych ludzi. Wystarczy zobaczyć jak Atlas pokonuje różne przeszkody i dosłownie wykonuje fikołki. Handle to z kolei popis prędkości i umiejętności utrzymywania równowagi. Robot jest w stanie przenosić różne obiekty czy manewrować po torach przeszkód, a wszystko to osiągane jest przy niezwykłej płynności.
Wymienione powyżej roboty są bardzo zaawansowane, a ich zdolność interakcji z otoczeniem jest na bardzo wysokim poziomie (warto zobaczyć je w akcji np. na YouTube). Każdy młody robotyk będzie chciał wprawić swoje kreacje w ruch, dlatego prędzej czy później odkryje wartość znajdującą się w silnikach elektrycznych i serwomechanizmach (potocznie serwa). Co to jest serwomechanizm? To mechanizm składający się z paru elementów. Silnik, potencjometr, przekładnia, układ sterujący, zamknięte pod jedną obudową. Z zasady ich stopień swobody obrotu wynosi 180 stopni. Podczas budowania pierwszych robotów, trzeba będzie pamiętać o tym, że zasilanie takich serwomechanizmów powinno być osobnym, dostatecznie wydajnym źródłem. Serwomechanizmy mają różne typy, wielkość, szybkość, siłę czy rodzaj przekładni.
Budowanie prostych robotów – podsumowanie
Do zbudowania prostego robota mobilnego będziemy potrzebować zarówno odpowiednich narzędzi, jak i komponentów. Osoby zainteresowane tematem robotyki powinny znać podstawy elektroniki, mechaniki, a także programowania. Wszystko to składa się w spójną całość i pozwala na osiąganie choćby drobnych sukcesów w budowaniu robotów. W dzisiejszych czasach istnieje naprawdę wiele udogodnień, które ułatwiają ćwiczenie umiejętności i zagłębianie się w temat robotyki. Możemy na przykład wykorzystać Raspberry Pi albo Arduino. To idealne platformy dla hobbystów, którzy chcą uczyć się programowania oraz składania prostych robotów. Dzięki Arduino nie trzeba tracić dodatkowej ilości czasu np. na projektowanie własnych płytek. Mając taki moduł z mikrokontrolerami można bardzo łatwo zabrać się za programowanie, wykorzystując do tego ogólnodostępne biblioteki.
Istnieją zestawy do uczenia się podstaw robotyki. Są to różne konfiguracje zawierające płytkę Arduino oraz podstawowe elementy elektroniczne, dzięki którym można się uczyć elektroniki, programowania i budowania prostych robotów. Tak samo Raspberry Pi stanowi ogromne udogodnienie dla wszystkich młodych robotyków, choć jest to trochę inna platforma – ogólnie mówiąc dająca większe możliwości.

Niezależnie od tego, czy będziemy chcieli bazować na wspomnianych wyżej Arduino i Raspberry Pi, czy też zaopatrzymy się w płytkę uniwersalną i garść elementów składowych, będziemy musieli znać podstawy elektroniki. Najpierw powinniśmy zainwestować w wiedzę, bez której się nie obejdziemy (książki, kursy internetowe, kursy wideo, szkoła o odpowiednim kierunku). Następnie ćwiczenia podczas których przydadzą się m.in. opisane wyżej narzędzia, pozwolą na stopniowe uczenie się tematu od strony praktycznej. Znajomość elementów składowych robotów (część wypisaliśmy i krótko omówiliśmy powyżej) jest równie ważna. Oczywiście można szukać wielu ułatwień, bo w dzisiejszych czasach są jak najbardziej dostępne (gotowe zestawy etc.), lecz nauki z zakresu elektroniki, programowania, mechaniki nie da się skrócić, jeżeli chcemy traktować temat robotyki poważnie.
Zbudowanie pierwszego światłoluba lub line followera to spora satysfakcja, a także przedsięwzięcie wymagające wypracowania odpowiednich umiejętności. Kursy budowy robotów często zaczynają się właśnie od takich rzeczy.








