Aby łatwo móc zmieniać kierunek obrotów silnika oraz regulować jego prędkość obrotową, niezbędne jest użycie odpowiedniego układu sterującego, którego konstrukcja zapewnia realizację tych funkcji. Moduł elektroniczny zbudowany na układzie L298N znakomicie spełnia obie.
Za jego pomocą można sterować dwoma klasycznymi silnikami prądu stałego lub pojedynczym silnikiem krokowym z dwiema parami biegunów. Wymiary modułu umożliwiają jego zamontowanie również w obudowach urządzeń, które nie grzeszą pod względem dużej ilości wolnego miejsca. Moduł jest zasilany napięciem 12V i umożliwia realizację zasilania i sterowania silnikami o poborze prądu do 2A na pojedynczy kanał.
PWM i mostek typu H – technika sterowania silnikami prądu stałego
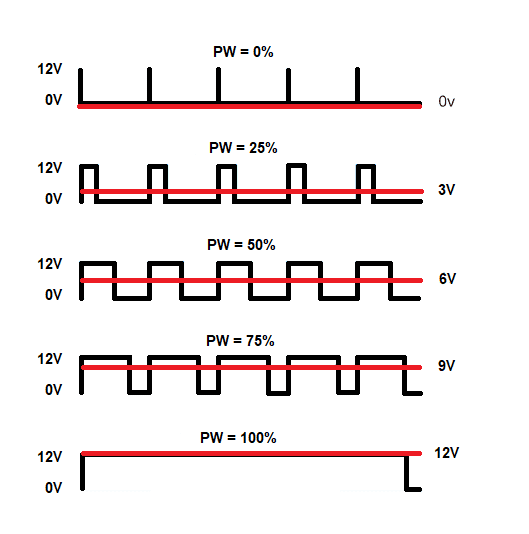
W większości przypadków najważniejszymi parametrami roboczymi silnika elektrycznego pod kątem sterowania są prędkość obrotowa oraz kierunek obrotów. Aby to zrealizować, wykorzystuje się specjalne układy sterowania. Należą do nich generator sygnału PWM oraz mostek typu H. Moduł dwukanałowego sterownika silników wykorzystujący układ L298N realizuje obie te funkcje. Sterowanie prędkością obrotową silników popularnie jest realizowane poprzez sterowanie źródłem napięcia zasilającego za pomocą sygnału prostokątnego o zmiennym współczynniku wypełnienia poprzez modulację szerokości impulsów (PWM – ang. Pulse Width Modulation). Modulacja PWM w regulacji prędkości obrotowej polega na sterowaniu zasilaniem poprzez jego okresowe włączanie i wyłączanie w taki sposób, aby silnik pracował z zadaną nastawą prędkości obrotowej. Wówczas średnia wartość całookresowa napięcia zasilającego silnik jest określona przez stosunek czasu trwania stanu wysokiego (włączenia napięcia) do całego, pojedynczego okresu sygnału sterującego. Oznacza to, że im wyższa wartość współczynnika wypełnienia, tym wyższa średnia wartość napięcia zasilania i odpowiednio wyższa prędkość obrotowa silnika, co obrazuje rysunek.
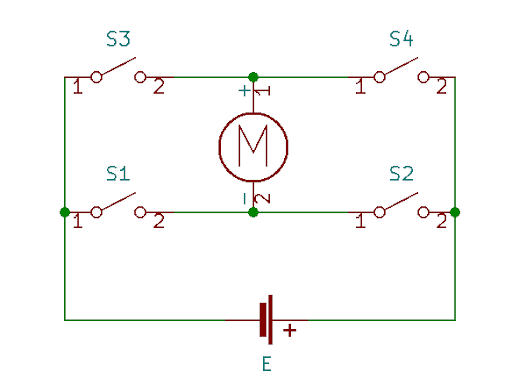
Drugim istotnym elementem układu sterowania silnikami prądu stałego jest mostek typu H, który umożliwia błyskawiczną zmianę biegunowości napięcia zasilającego silnik, czego następstwem jest zmiana kierunku obrotów w przeciwną stronę. Typową konstrukcję mostka typu H (rys.2) tworzą cztery przełączniki ułożone na schemacie ideowym w kształt litery “H”. Zamknięte przełączniki S2 i S3 oraz otwarte przełączniki S1 i S4 powodują podanie na stojan silnika napięcia o dodatniej biegunowości i obracanie się zgodne z ruchem wskazówek zegara. Jeśli zmienimy stany wszystkich przełączników na przeciwne, wówczas silnik będzie zasilany napięciem o ujemnej biegunowości, a jego wał będzie obracał się w kierunku przeciwnym.
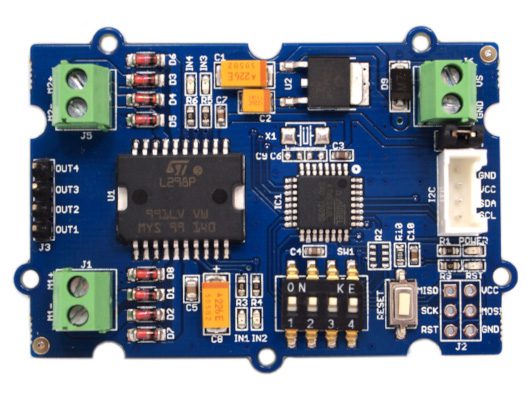
L298N - dwukanałowy sterownik silników - moduł 12V/2 - charakterystyka sprzętowa
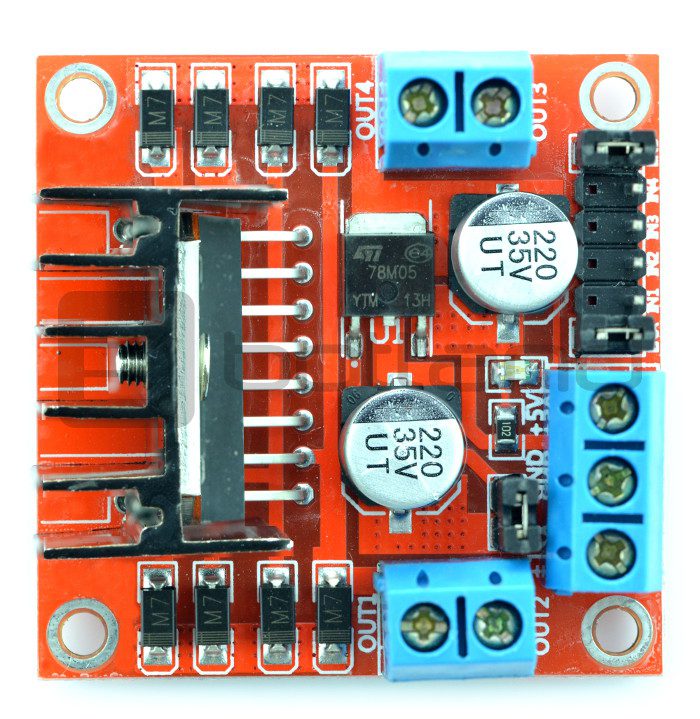
Moduł sterownika silników jest wyposażony w specjalizowany układ scalony L298N, w którego obudowie umieszczono dwa mostki typu H, umożliwiając tym sposobem zasilanie i sterowanie dwóch silników elektrycznych prądu stałego w sposób niezależny. Źródła napięcia zasilającego dla układu sterowania (VSS) oraz dla silnika (VS) są podłączane niezależnie do złączy śrubowych typu ARK o rastrze wyprowadzeń wynoszącym 3,5 mm. Moduł umożliwia podłączenie szerokiego zakresu napięć zasilających obwód prądu roboczego, tj. od 5 do 35 V. Na płytce PCB modułu umieszczono także scalony regulator napięcia 7805, który dostarcza napięcie 5V niezbędne do zasilania obwodu sterującego. Na płytce PCB modułu znajdziemy także specjalną zworkę. Kiedy zworka jest podłączona, regulator napięcia jest załączony i dostarcza do obwodu sterującego napięcie 5V z maksymalną przepustowością prądu do 500mA.
W takim trybie możemy użyć regulatora do zasilania zewnętrznych układów, np. płytki Arduino lub innych układów, które wymagają doprowadzenia zasilania napięciem 5V. Kiedy zworka jest usunięta, wówczas wbudowany regulator napięcia zostaje wyłączony, a zasilanie należy doprowadzić z zewnętrznego źródła. Jeśli podłączony do modułu silnik jest zasilany napięciem nieprzekraczającym 12V, to układ można używać z założoną zworką. Natomiast jeśli napięcie zasilania silnika przekracza 12V lub jeśli do modułu podłączone są dwa silniki jednocześnie, wówczas należy usunąć zworkę i doprowadzić zasilanie ze źródła zewnętrznego, aby zapobiec uszkodzeniu regulatora napięcia. Spadek napięcia generowany przez układ scalony L298N wynosi w przybliżeniu 2V i jest on spowodowany przez złącza tranzystorów przełączających w układzie mostka typu H. Przykładowo, aby uzyskać maksymalną prędkość obrotową silników zasilanych napięciem znamionowym 12V, ze względu na spadek napięcia w mostku typu H na poziomie 2V, do modułu należy podłączyć źródło zasilania o napięciu wyjściowym na poziomie minimalnym ok. 14V.
Opis wyprowadzeń sterownika L298N
Moduł sterownika silników L298N jest wyposażony w następujące wyprowadzenia i złącza:
- “VCC” – złącze napięcia zasilającego dla silników. Przedział napięcia zasilającego wynosi od 5 do 35 V. Jeśli na płytce jest założona zworka, wówczas konieczne jest dostarczenie napięcia nie mniejszego niż +7V, z uwagi na spadek napięcia generowany przez strukturę półprzewodnikową układu scalonego L298N.
- “GND” – masa zasilania wspólna dla obwodu sterującego i obwodu roboczego silników.
- “5V” – złącze napięcia zasilającego obwód sterujący. Jeśli na płytce jest założona zworka, wówczas to wyprowadzenie może funkcjonować jako złącze zasilające płytkę Arduino. Jeśli natomiast zworka jest usunięta, wówczas należy podłączyć źródło napięcia zasilania 5V z zewnętrznych układów, np. z pinu zasilania “5V” w Arduino.
- “ENA” – złącze sterujące prędkością pierwszego silnika. Ustawienie tego pinu w stan wysoki (przy założonej zworce regulatora napięcia), spowoduje wprowadzenie silnika na najwyższe możliwe obroty, a przerzucenie w stan niski, spowoduje zatrzymanie się silnika. Usuwając zworkę, możemy za pomocą sygnału PWM płynnie sterować prędkością obrotową silnika.
- “IN1” i “IN2” – wyprowadzenia sterujące kierunkiem obrotów pierwszego silnika. Kiedy występują na nich stany logiczne przeciwne względem siebie, silnik się obraca. Natomiast kiedy występują na nich takie same stany logiczne, silnik się zatrzymuje.
- “IN3” i “IN4” – wyprowadzenia sterujące kierunkiem obrotów drugiego silnika. Kiedy występują na nich stany logiczne przeciwne względem siebie, silnik się obraca. Natomiast kiedy występują na nich takie same stany logiczne, silnik się zatrzymuje.
- “ENB” – złącze sterujące prędkością drugiego silnika. Ustawienie tego pinu w stan wysoki (przy założonej zworce regulatora napięcia), spowoduje wprowadzenie silnika na najwyższe możliwe obroty, a przerzucenie w stan niski, spowoduje zatrzymanie się silnika. Usuwając zworkę, możemy za pomocą sygnału PWM płynnie sterować prędkością obrotową silnika.
- “OUT1” i “OUT2” – złącza zasilające dla silnika pierwszego.
- “OUT3” i “OUT4” – złącza zasilające dla silnika drugiego.
Jak oceniasz ten wpis blogowy?
Kliknij gwiazdkę, aby go ocenić!
Średnia ocena: 5 / 5. Liczba głosów: 6
Jak dotąd brak głosów! Bądź pierwszą osobą, która oceni ten wpis.







2 Responses
jeśli przełączniki S1 i S3 będą zamknęte, silnik nie zakręci. Poprawcie artykuł proszę.
Dziękujemy za komentarz, poprawka została wprowadzona.