Spis treści:
- 1 Roboty wojskowe
- 2 Historia wykorzystania robotyki w wojsku
- 3 Roboty w wojsku w ZSRR
- 4 Roboty w wojsku i zdalnie sterowana broń obecnie
- 5 Zadanie wojskowej czujki
- 6 Nowoczesne roboty – samoloty
- 7 Rozwijane systemy – robot-żołnierz
- 8 A może armia robotów?
- 9 Co mogą robić roboty?
- 10 Problemy techniczne i implikacje moralne
Robotyka to dyscyplina naukowa i inżynierska, która koncentruje się na zrozumieniu i wykorzystaniu sztucznych tworów człowieka. Jest to nauka interdyscyplinarna wykorzystująca zdobycze inżynierii mechanicznej, elektroniki, informatyki itp.. Obecnie dziedzina ta pokrywa się z elektroniką, informatyką, mechatroniką, nanotechnologią, bioinżynierią i sztuczną inteligencją. Po stronie inżynieryjnej robotyka zajmuje się projektowaniem, budową, działaniem i użytkowaniem robotów – zwłaszcza za pomocą systemów komputerowych, zbierania informacji sensorycznych i przetwarzania zebranych informacji. Ze strony naukowej robotyka bada, w jaki sposób środowisko i konstrukcja robota wpływają na jego wydajność, a także – szczególnie w przypadku zastosowań takich jak militarne – zajmuje się kwestiami etyki wykorzystywania tych maszyn.
Roboty to maszyny, które mogą zastępować ludzi i powielać ludzkie działania. Zazwyczaj są używane do zadań trudnych, niemożliwych do wykonania lub po prostu uciążliwych dla ludzi. Mogą być używane w wielu sytuacjach i do wielu celów, np. w środowiskach niebezpiecznych (w tym do wykrywania i dezaktywacji bomb), w procesach produkcyjnych lub tam, gdzie ludzie nie mogą przetrwać (np. w kosmosie, pod wodą, w wysokiej czy niskiej temperaturze, a także do usuwania materiałów niebezpiecznych i promieniotwórczych). Roboty mogą przybierać dowolną formę; niektóre z nich mają wygląd przypominający ludzi (mówi się wtedy o robotach humanoidalnych). Takie roboty próbują naśladować ruchy, mowę lub jakiekolwiek inne czynności wykonywane przez człowieka. Współcześnie zauważyć można rozwój robotyki inspirowanej biologią.
Koncepcja tworzenia maszyn, które mogą działać autonomicznie, sięga co najmniej kilkuset lat wstecz, ale badania nad funkcjonalnością i potencjalnymi zastosowaniami robotów nie rozwinęły się znacznie aż do XX wieku. Dawni uczeni, wynalazcy, inżynierowie i technicy zakładali, że kiedyś roboty będą w stanie naśladować ludzkie zachowanie i zarządzać zadaniami w sposób podobny do naszego. Obecnie jeszcze nie udało się osiągnąć poziomu rozwoju sztucznej inteligencji, który pozwalałby na uzyskanie tak daleko idącej autonomii – roboty najczęściej są w pełni zdalnie sterowane przez człowieka lub też tylko wspomagają go z pomocą np. algorytmów uczenia maszynowego, które choć dużo szybsze w pewnych zadaniach, zawsze są wyspecjalizowane tylko w wąskiej dziedzinie.
Roboty wojskowe
Obecnie robotyka jest szybko rozwijającą się dziedziną (tak w wojsku, jak i ‘w cywilu’). W miarę postępu technologicznego badania, projektowanie i budowanie nowych robotów służą różnym praktycznym celom przemysłowym, rozrywkowym, handlowym, a także wojskowym. Wiele robotów budowanych jest do wykonywania niebezpiecznych dla ludzi prac, takich jak rozbrajanie bomb, znajdowanie ocalałych w niestabilnych ruinach (po katastrofach naturalnych itp.) oraz eksploracja kopalni i wraków statków. Robotyka wykorzystywana jest również w edukacji jako pomoc dydaktyczna. Nanoroboty wojskowe to mikroskopijne roboty, które można wstrzykiwać np. do ludzkiego ciała. Pojawienie się takich konstrukcji może zrewolucjonizować medycynę.
Historia wykorzystania robotyki w wojsku
Pierwsze szeroko zdefiniowane roboty wojskowe pochodzą już z czasów II wojny światowej. Za pierwsze wykorzystywane na szeroką skalę wojskowe roboty uważa się niemieckie, zdalnie sterowane czołgi-miny Goliat (Sd.Kfz. 302 i Sd.Kfz. 303a oraz 303b). Były to gąsienicowe pojazdy sterowane przez operatora za pomocą kabla. Głównym uzbrojeniem pojazdu był ważący od 75 kg do 100 kg ładunek wybuchowy, który detonowano zdalnie. Zasięg pojazdu (ograniczony długością przewodu sterującego) wynosił 650 metrów. Niemieckie wojska nie uznały konstrukcji za duży sukces głównie z powodu zawodnej na polu walki metody sterowania.

Goliat nie był jednak pierwszą próbą stworzenia robota wojskowego. Już podczas I wojny światowej, a także po jej zakończeniu, wielu wynalazców opracowywało małe, zdalnie sterowane pojazdy gąsienicowe przeznaczone do przenoszenia ładunków wybuchowych. W latach 10. XX wieku Francuzi opracowali dwa pojazdy tego rodzaju nazwane przez nich “lądowymi torpedami” przez analogię do torped stosowanych w wodzie. Pierwszy z nich, określany jako Krokodyl, miał na pokładzie 40 kilogramów ładunków wybuchowych. Doczekał się ograniczonego zastosowania i testów w roku 1916. Drugą konstrukcją była torpeda lądowa Aubriot-Gabet napędzana zdalnie sterowanym i zasilanym silnikiem elektrycznym. Sterowana była sprzęgłami na gąsienicach lub w ogóle – miała jedynie przejechać przez dany teren zdetonować się we wrogim okopie. System ten nie doczekał się praktycznego zastosowania. Dwa lata później Amerykanin Elmer Wickersham opatentował konstrukcję torpedy lądowej, ale nie rozwijał dalej tego systemu.
Roboty w wojsku w ZSRR
Po drugiej stronie żelaznej kurtyny także powstawały podobne konstrukcje. W Związku Radzieckim w czasie II wojny światowej konstruowano tzw. teletanki. Były to sterowane radiowo modyfikacje istniejących sowieckich czołgów T-18, T-26, T-38, BT-5 oraz BT-7. Montowano na nich rozmaite uzbrojenie – karabiny maszynowe, miotacze ognia i ładunki wybuchowe – w odróżnieniu od francuskich i niemieckich konstrukcji pojazdy te były przeznaczone do wielorazowego użytku – znajdujący się na wyposażeniu czołgu ładunek wybuchowy (o wadze od 200 do 700 kilogramów) był zdalnie odłączany od czołgu po jego dowiezieniu na miejsce. Teletanki komunikowały się z operatorem na dwóch częstotliwościach (aby uniemożliwić zakłócenie transmisji) i były w stanie, zależnie od modelu, rozpoznawać od 16 do 24 komend.
Roboty w wojsku i zdalnie sterowana broń obecnie
Większość systemów robotycznych stosowanych obecnie w wojsku nie przypomina zwykłego żołnierza. Na tym polu dominują głównie zdalnie sterowane pojazdy, takie jak bezzałogowe samoloty do działań obserwacyjnych czy bojowych oraz roboty saperskie służące do rozbrajania ładunków wybuchowych bez angażowania człowieka. Jednymi z najczęściej stosowanych robotów na współczesnym polu walki są bezzałogowe samoloty (UAV), zwłaszcza zwiadowcze. Poza nimi stosowane pojazdy podzielone są na grupy takie jak: bezzałogowe pojazdy lądowe (UGV) i bezzałogowe pojazdy wodne (UUV). Niektóre klasyfikacje wyróżniają jeszcze wielofunkcyjne pojazdy użytkowo-logistyczne i sprzętowe (MULE) zaprojektowane w celu zapewnienia wsparcia bojowego w sytuacjach konfliktowych oraz uzbrojone pojazdy robotyczne (ARV), które mogą przenosić duże platformy uzbrojenia lub wyrafinowany sprzęt do nadzoru pola walki.

Zadanie wojskowej czujki
Pierwszymi nowoczesnymi systemami robotycznymi, które zaczęto stosować w wojsku, były zdalnie sterowane samoloty zwiadowcze. Jakkolwiek pierwsze pomysły i próby stosowania zdalnie sterowanych lub autonomicznych pojazdów latających do realizacji zadań wojskowych sięgają końca XIX wieku, to nowoczesne zwiadowcze UAV powstały dopiero w latach 50. XX wieku. Współczesne drony pierwszej generacji używane były na Bliskim Wschodzie (m.in. w trakcie konfliktów pomiędzy Izraelem a Egiptem) oraz podczas wojny w Wietnamie. Drony używane były do obserwacji i mylenia sił przeciwnika.
Sama czujka jest elementem, który jest wysyłany w celu zwiadowczym. Jej zadaniem jest obserwacja sił przeciwnika. Dlatego też wprowadzenie robotycznej czujki wydaje się tak atrakcyjnym i funkcjonalnym pomysłem.
Nowoczesne roboty – samoloty
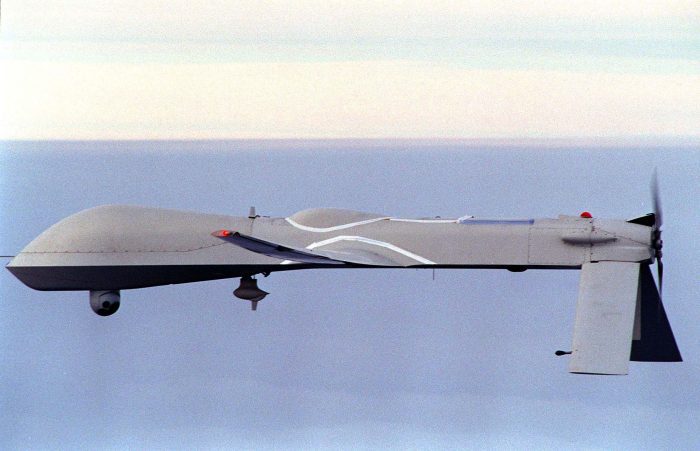
Najbardziej znanym obecnie stosowanym systemem UAV jest bezzałogowy statek powietrzny RQ-1 Predator. Jest to amerykański, zdalnie pilotowany samolot bezzałogowy zbudowany przez General Atomics. Jest używany głównie przez Siły Powietrzne Stanów Zjednoczonych (USAF) i CIA. Został zaprojektowany na początku lat 90. XX wieku początkowo do obserwacji i rozpoznania, następnie został zmodernizowany do przenoszenia pocisków Hellfire lub podobnych. Samolot ten wszedł do służby w 1995 roku i dotąd brał udział w wojnach w Afganistanie, Pakistanie, interwencji NATO w Bośni, Serbii, wojnach w Iraku, Jemenie, w wojnie domowej w Libii w 2011 roku, Interwencji w Syrii w 2014 roku i w działaniach w Somalii.
Obecnie podstawowym UAV wykorzystywanym przez USAF jest MQ-9 Reaper. Jest to pierwszy samolot zdalnie sterowany, który został zaprojektowany nie tylko jako samolot zwiadowczy, ale także jako myśliwiec do zwalczania celów naziemnych i latających. MQ-9 jest większy i cięższy od wcześniejszego modelu MQ-1, może być jednak kontrolowany przez te same systemy naziemne. MQ-9 wyposażony jest w silnik turbośmigłowy o mocy 950 KM (predator ma silnik o mocy 115 KM). Większa moc pozwala temu UAV przenosić 15 razy więcej ładunków i poruszać się z prędkością około trzy razy większą niż MQ-1. Samolot jest monitorowany i kontrolowany przez załogę w naziemnej stacji kontroli (GCS), w tym w zakresie wykorzystania przenoszonej broni.
Samolot został wprowadzony do służby w 2007 roku i od tego czasu zdobywa coraz szersze zainteresowanie. W 2008 roku 174. skrzydło ataku Nowojorskiej Gwardii Lotniczej rozpoczęło przejście z myśliwców F-16 na pojazdy MQ-9A, stając się pierwszą jednostką myśliwców, która całkowicie przeszła na użytkowanie bezzałogowych statków powietrznych. USAF wykorzystuje obecnie 195 maszyn MQ-9 i planuje utrzymać MQ-9 w służbie do lat 30. XXI wieku.
W marcu 2011 roku Siły Powietrzne Stanów Zjednoczonych szkoliły więcej pilotów dla zaawansowanych bezzałogowych statków powietrznych niż dla jakiegokolwiek innego systemu lotniczego wyposażonego w broń. Pojazdy MQ-9 są także wykorzystywane przez Marynarkę Wojenną Stanów Zjednoczonych, CIA, Urzędy Celne i Ochrony Granic, a także NASA oraz wojska kilku innych krajów.
Nie tylko siły powietrzne chętnie sięgają po bezzałogowe pojazdy. Jakkolwiek to UAV były pierwszymi zdalnie sterowanymi maszynami, po które sięgnęły siły wojskowe na całym świecie, to obecnie równie często wykorzystywane są bezzałogowe pojazdy lądowe i morskie. Obecnie na rynku dostępne są pojazdy UGV, które mogą przenosić i strzelać z broni takiej jak strzelby, pistolety pieprzowe, granatniki, a nawet pociski Hellfire. Zdalnie sterowane roboty TALON mogą przenosić wszystko – od karabinu maszynowego M240, przez karabin kalibru .50, po granaty i wyrzutnie rakiet. Południowokoreański robot patrolowy może albo strzelać do intruzów nieśmiercionośnymi gumowymi pociskami, albo nosić karabin maszynowy K-3 (lekki karabin maszynowy podobny do M249).
Taktyczny bezzałogowy pojazd naziemny Gladiator amerykańskiego korpusu piechoty morskiej może nosić arsenał broni śmiercionośnej i nieśmiercionośnej, w tym:
- wielofunkcyjną broń szturmową zaprojektowaną do niszczenia bunkrów, dezaktywacji pojazdów pancernych i przebijania fortyfikacji,
- karabiny maszynowe M240 lub M249,
- lekki system do stawiania zasłon dymnych z wykorzystaniem granatów dymnych,
- system pomagający w pokonywaniu przeszkód, takich jak pola minowe. Moduł ten wyposażony jest w rakietę holującą linię połączoną z granatami odłamkowymi.
Inne narzędzia, w jakie wyposażone mogą być współcześnie wykorzystywane UGV, obejmują czujniki i kamery umożliwiające robotom wykrywanie i nawigację w różnych niebezpiecznych środowiskach. Roboty takie jak Gladiator mogą mieć kamery termowizyjne generujące obrazy. Większość robotów posiada również normalne kamery wideo wykorzystywane przez operatorów zdalnie sterujących pojazdami.
Jeszcze inne systemy robotyczne wykorzystywane przez wojsko, o których koniecznie trzeba wspomnieć, to niewidoczne podsystemy wykorzystywane w kontrolowanym przez ludzi sprzęcie wojskowym takie jak chociażby rozmaite systemy uzbrojenia wyposażone w robotyczne układy namierzania i śledzenia celu. Dzięki eliminacji konieczności prowadzenia manualnych obliczeń balistycznych, a także automatyzacji ruchu, np. działa, wyrzutni rakiet czy ładowania broni, możliwe jest znaczne przyspieszenie reakcji systemu na rozkaz. Przykładem mogą być automatyczne moździerze – amerykański Dragon Fire II czy fińsko-szwedzki AMOS, które pozwalają skrócić czas reakcji systemu do 12 sekund czy też automatycznie obliczyć trajektorię szeregu salw pojedynczego moździerza tak, aby wiele pocisków wystrzelonych z tej samej lufy dotarło do celu w tym samym momencie, maksymalizując efekt.
Rozwijane systemy – robot-żołnierz
Film „Terminator” pokazał potencjalną przyszłość, w której bataliony inteligentnych, humanoidalnych robotów toczą wojnę z ludzkością. Taka wizja nadal mieści się w sferze science fiction, ale wiele krajów chce stworzyć swoją wersję robotów-żołnierzy. W 2001 roku specjalna ustawa rządu federalnego Stanów Zjednoczonych wyznaczyła kierunek dla Sił Zbrojnych USA w tym zakresie – stworzyć bezzałogową siłę bojową, która stanowiłaby jedną trzecią wszystkich działających pojazdów. Jak dotąd prezentowane projekty robotów nie przypominają filmowego Terminatora, ale mogą być równie niebezpieczne dla przeciwnika.
Plan Future Combat Systems (FCS) sił zbrojnych USA to kompleksowa strategia modernizacji systemów wojskowych we wszystkich rodzajach sił zbrojnych. Realizacja planu zakłada stworzenie zintegrowanego systemu walki – floty różnych pojazdów, które wykorzystają do 80% tych samych części (dla ułatwienia ich serwisowania, szczególnie w warunkach bojowych), nowych, bezobsługowych czujników zaprojektowanych do zbierania danych wywiadowczych w terenie oraz bezzałogowych systemów uzbrojenia, które mogą razić cele spoza linii wzroku.
Na szczególną uwagę w ramach FCS zasługują rozwijane pojazdy kategorii MULE i ARV. Ich wprowadzenie może oznaczać początek nowego rodzaju działań wojennych. Istnieją trzy proponowane wersje pojazdu MULE, z których wszystkie będą umieszczone na kołach. Dwa warianty: pojazd transportowy, który może przewozić ponad tonę sprzętu oraz pojazd zaprojektowany do wykrywania i dezaktywacji min przeciwpiechotnych, są podobne do obecnych robotów wojskowych. Trzecią jest uzbrojony robot – tzw. lekki pojazd szturmowy. Będzie miał pakiet system rozpoznania, nadzoru i pozyskiwania celów (RSTA) oraz zintegrowaną broń. Innymi słowy, robot ten ma być podobny do zwykłego żołnierza – człowieka – który może walczyć z wrogiem.

Roboty ARV są już mniej podobne do żołnierzy, a bardziej do kompaktowych czołgów. Celem armii jest wykorzystanie robotów ARV jako wsparcia dla misji załogowych. Na przykład dowódca eskadry czołgów mógłby użyć robotów ARV, aby rozszerzyć obszar wpływów swojej drużyny pancernej bez potrzeby zwiększania liczby żołnierzy czy narażania ich życia. Roboty mogą zajmować najbardziej niebezpieczne pozycje i zapewniać wsparcie za każdym razem, gdy załogowe pojazdy znajdą się w sytuacji bojowej.
A może armia robotów?
Jednakże z powodu cięć budżetowych wiele droższych w realizacji pomysłów zawartych w FCS może wymagać odroczenia. Pojazdy MULE i ARV niestety należą do tej kategorii. W rezultacie może minąć jeszcze kilka lat, zanim roboty amerykańskie będą wykorzystywane w scenariuszach bojowych. Mimo to wojsko USA jest zdeterminowane, aby nadal inwestować w roboty, mając nadzieję, że pewnego dnia zajmą one miejsce żołnierzy w niebezpiecznych sytuacjach. Armia chce, aby robotyczni żołnierze byli w stanie osiągnąć te same cele, co grupa ludzka. Będą musieli być autonomiczni i umieć identyfikować cele, rozróżniać siły przyjazne i wrogie, atakować nieprzyjaciela i wchodzić w interakcje z innymi ludźmi i robotami w sposób wykraczający poza strzelanie. Obecnie większość robotów jest kontrolowana zdalnie przez człowieka, chociaż niektóre z pojazdów mają ograniczoną autonomię i mogą np. przemieszczać się z punktu A do punktu B przy minimalnym tylko nadzorze. Jednakże aby armia robotów była skuteczną siłą bojową, konieczne jest, by poszczególne roboty mogły samodzielnie oceniać sytuacje i podejmować decyzje bez polegania na człowieku.
Co mogą robić roboty?
Czy zastępy humanoidalnych robotów w pewnym momencie wkroczą na pole walki, zastępując żołnierzy? Nie można tego w pełni wykluczyć. Laboratorium badawcze armii amerykańskiej stworzyło oprogramowanie, które pozwala robotom zrozumieć instrukcje słowne, wykonywać zadania i składać raporty. Potencjalne zyski z takiego podejścia są ogromne. Robot, który rozumie polecenia i jest inteligentny, pewnego dnia będzie w stanie wyprzedzić żołnierzy i sprawdzić, czy na drodze nie ma IED (improwizowanego ładunku wybuchowego) czy zasadzki. Może to zmniejszyć liczbę potrzebnych żołnierzy i wyraźnie zredukować śmiertelność.
“Nawet samochody autonomiczne nie mają jeszcze wystarczającej inteligencji, aby móc wykonywać instrukcje wydane przez ludzi i wykonywać złożone zadania” mówi Nicholas Roy z MIT. Jest on częścią zespołu odpowiedzialnego za projekt oprogramowania do rozumienia poleceń słownych. “Ale nasz robot może to w przyszłości zrobić” dodaje. Roy pracował nad tym problemem w ramach Robotics Collaborative Technology Alliance, 10-letniego projektu prowadzonego przez Army Research Laboratory (ARL). Zespół projektowy obejmował naukowców z MIT i Carnegie Mellon współpracujących z instytucjami rządowymi, takimi jak Jet Propulsion Laboratory NASA oraz firmami zajmującymi się robotyką, takimi jak Boston Dynamics.
Program zakończył się i pokazał, że wiele udało się osiągnąć. W ramach projektu roboty były poddawane próbom, pokazując swoje umiejętności manipulacyjne, mobilność nad przeszkodami i zdolność do wykonywania instrukcji ustnych. W projekcie chodziło głównie o to, aby maszyny były w stanie efektywniej współpracować z ludźmi – podobnie jak pies wojskowy. “Pies jest doskonałym przykładem tego, do czego dążymy pod względem współpracy z ludźmi” mówi kierownik projektu Stuart Young. Podobnie jak pies, robot może przyjmować instrukcje ustne i interpretować gesty. To, czego pies nie potrafi, to bycie zdalnie sterowanym za pomocą tabletu i zwracanie informacji w postaci map czy obrazów tak, aby operator mógł na przykład dokładnie zobaczyć, co znajduje się za budynkiem.
Zespół zastosował podejście hybrydowe wykorzystujące algorytmy głębokiego uczenia maszynowego podobne do tych, które Google wykorzystuje do rozpoznawania obiektów na zdjęciach. Pozwalają one robotom identyfikować budynki, roślinność, pojazdy i ludzi. Oprócz identyfikowania całych obiektów robot wykorzystujący to oprogramowanie może również rozpoznać kluczowe elementy, takie jak reflektory czy koła samochodu, co pomaga mu ustalić dokładną pozycję i orientację samochodu. Po wykorzystaniu algorytmów uczenia maszynowego do identyfikacji obiektu, program korzysta z klasycznej bazy wiedzy w celu uzyskania bardziej szczegółowych informacji. Na przykład gdy rozpozna obiekt jako samochód, sprawdza listę faktów dotyczących samochodów: samochód jest pojazdem, ma koła i silnik itd. Fakty te muszą być jednak wcześniej ręcznie zakodowane, a ich kompilacja jest czasochłonna. Stump poinformował, że zespół szuka sposobów na usprawnienie tego procesu, a DARPA jest skłonna współfinansować te starania.
Young podaje przykład polecenia “Jedź za najdalszą ciężarówką po lewej stronie”. Oprócz rozpoznawania obiektów i ich lokalizacji, robot musi rozszyfrować co to znaczy “za” i “po lewej”, które zależą od tego, gdzie stoi mówiący i co wskazuje. Jego znajomość środowiska daje mu dalsze wskazówki dotyczące tego, jak musi wykonać swoje zadanie. Robot może również zadawać pytania w celu rozwiązania niejasności. Jeśli powie się mu, żeby “poszedł za budynek”, może dopytać: “Masz na myśli budynek po prawej stronie?”. Dopiero taki poziom inteligencji maszynowej i autonomii robotów realnie wykorzystywać je w wojsku.
Problemy techniczne i implikacje moralne
Pierwsze prawo robotyki stworzone przez amerykańskiego pisarza Isaaca Asimova jasno mówi, że żaden robot nie może skrzywdzić człowieka, nawet gdy jego właściciel/operator mu to nakaże. Stoi to w sprzeczności z niektórymi zastosowaniami robotów w wojsku, jednakże w praktyce znakomita większość militarnych aplikacji robotów nie używa bezpośrednio siły przeciwko ludziom.
Trzy prawa robotyki (znane jako prawa Asimova) to zbiór zasad opracowanych przez autora fantastyki naukowej Isaaca Asimova. Zasady te zostały wprowadzone w jego opowiadaniu z 1942 r. „Runaround” (zawartym w kolekcji “Ja, Robot” z 1950 roku), Trzy prawa, to:
- Robot nie może zranić człowieka ani poprzez swoją bezczynność pozwolić, by człowiekowi stała się krzywda.
- Robot musi być posłuszny poleceniom wydanym przez ludzi z wyjątkiem przypadków, gdy takie rozkazy byłyby sprzeczne z Pierwszym Prawem.
- Robot musi chronić swoje istnienie, o ile taka ochrona nie jest sprzeczna z Pierwszym lub Drugim Prawem.
Prawa te są wykładnią współczesnego projektowania robotów i innych systemów. Pierwotne prawa zostały z biegiem czasu zmienione i rozwinięte, także przez samego Asimova. Dodał on także ważne, zerowe prawo: “Robot nie może wyrządzić krzywdy ludzkości lub przez bezczynność pozwolić wyrządzić krzywdę ludzkości”. Zerowe prawo zostało przeformatowane i połączone z pierwszym prawem w prozie Bayleya, który zapisuje je jako: “Robot może skrzywdzić człowieka, o ile jest on w stanie udowodnić, że skrzywdzenie tego człowieka przyniesie korzyść ludzkości jako całości”. Ta elegancka definicja daje ogromne pole do popisu w wielu systemach militarnych, które z założenia mają właśnie móc krzywdzić określoną grupę ludzi, przynosząc tym samym korzyść ludzkości (a przynajmniej jakiejś jej określonej podgrupie). Takie podejście ukształtowało nowoczesne science-fiction i współczesne podejście do robotów bojowych w różnych formach.
Widzimy więc, że roboty bojowe są technologią, która obecnie rozwija się niezwykle dynamicznie. Nie są to urządzenia przypominające człowieka, lecz bezzałogowe maszyny bojowe. Maszyny te są lżejsze, zwinniejsze, mobilne i odporniejsze na różnorodne ataki. Właśnie to czyni je tak atrakcyjnymi.
Pierwsza bariera dla w pełni funkcjonalnej armii robotów ma charakter techniczny – nikt nie stworzył niezawodnego, skutecznego sposobu na uczynienie robotów naprawdę autonomicznymi. Naukowcy w ostatnich latach poczynili jednak znaczne postępy w tym zakresie. DARPA od ponad 10 lat inwestuje ogromne środki na tworzenie pojazdów autonomicznych, systemów rozumienia poleceń słownych etc. Jak pokazują najnowsze ujawnione doniesienia, wiele systemów robotycznych już teraz stosowanych w wojsku wykorzystuje te osiągnięcia, aby wprowadzić w swoje działania pewien stopień autonomii – na przykład w postaci automatycznego poruszania się za/obok żołnierzy czy nawigacji pomiędzy punktami naniesionymi na mapie.
Nawigacja jest jedną z ważnych przeszkód do pokonania w dążeniu do autonomii robotów, jednak jeśli wojsko chce, aby stworzony przez nie robot mógł lokalizować, identyfikować i strzelać do wrogich żołnierzy, problemy są dużo poważniejsze. Odkrycie, jak nauczyć robota rozróżniania wrogów, sojuszników i niewinnych obserwatorów może zająć jeszcze dużo czasu, zwłaszcza że w międzyczasie pojawia się wiele pytań. Czy kraj z uzbrojonymi robotami miałby realnie większe szanse dokonać inwazji na inny kraj, wiedząc, że taka operacja spowoduje bardzo niewiele ofiar? Czy usuwając element ludzki z wojny, czyni się ją jeszcze bardziej nieludzką? Czy w przypadku awarii robota podczas misji należy ryzykować życiem ludzi w celu jego odzyskania i naprawy? Czy można być pewnym, że roboty będą wiedziały, kiedy przestać atakować, gdy wróg się podda? Zakodowanie takich ludzkich odruchów może być jeszcze bardziej skomplikowane.
Niezależnie od postępów w przetwarzaniu komputerowym bez nadzoru i kontroli ze strony człowieka w pełni autonomiczne systemy uzbrojenia popełniają błędy.
Jakkolwiek należy zgodzić się, że nie ma różnicy między przypadkową śmiercią cywila zabitego przez człowieka i przez komputer, to występuje tutaj jeszcze jeden aspekt poza racjonalną analizą sytuacji związany z odpowiedzialnością człowieka za maszyny. Dowódcy, planujący wdrożenie robotycznych żołnierzy powinni o tym pamiętać, gdyż jest to nie tylko problem techniczny i etyczny, ale także społeczny – grozi utratą zaufania publicznego do instytucji wojskowych.









