






























































































































































































































































































- EOL










Oparty na mikrokontrolerze STM32 F103RET6, 72 kHz, 64 kB pamięci SRAM oraz 512 kB pamięci Flash. Posiada moduł Bluetooth, dwukanałowy sterownik silników DRV8833 o wydajności 1,5 A oraz automatyczne wykrywanie źródła zasilania. Urządzenie można programować poprzez przewód microUSB z wykorzystaniem środowiska Arduino IDE.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
Oparty na mikrokontrolerze STM32 F103RET6, 72 kHz, 64 kB pamięci SRAM oraz 512 kB pamięci Flash. Może być programowany poprzez środowisko Arduino IDE z wykorzystaniem dostępnych bibliotek. Oprócz tradycyjnych cech płytek Arduino posiada układ BLE CC2540, który umożliwia komunikacje poprzez Bluetooth 4.0, dwa dwukanałowe sterowniki silników HR8833 o wydajności 1,5 A oraz automatyczne wykrywanie źródła zasilania.
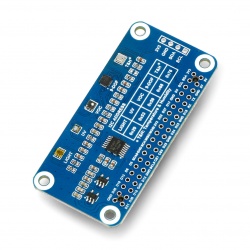
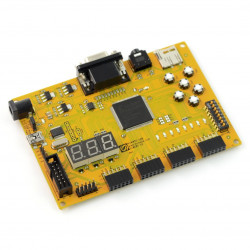
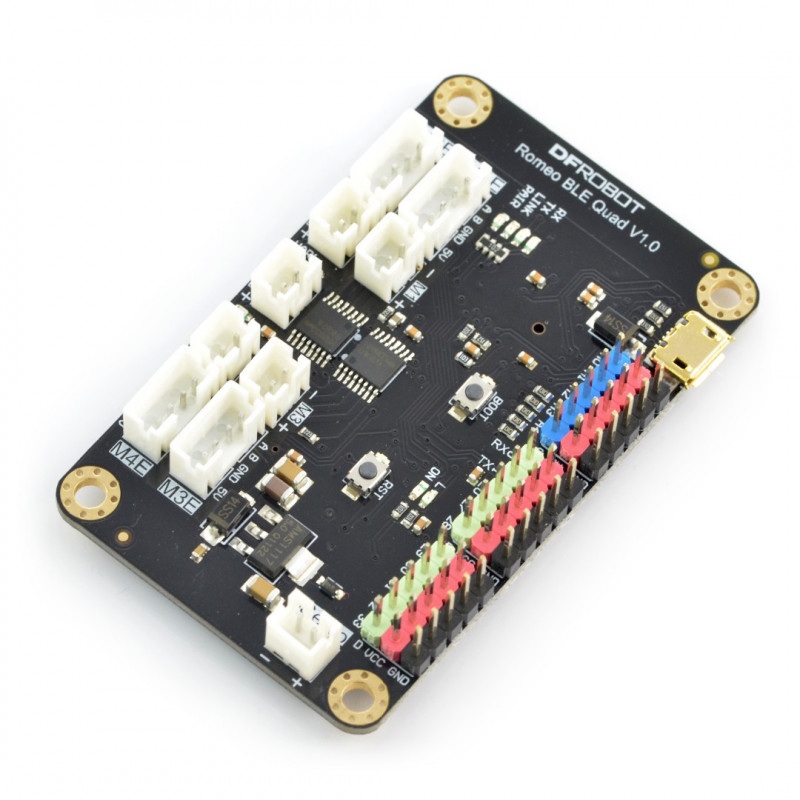
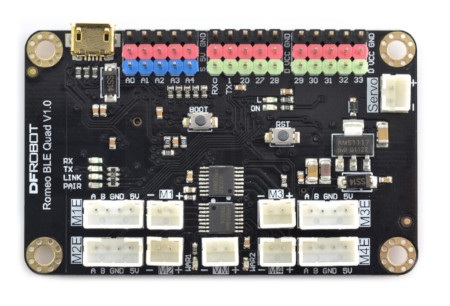
Płytka zawiera mikrokontroler STM32 F103RET6 , wyposażony w 10 cyfrowych wejść/wyjść i 5 jako analogowe wejścia. Moduł posiada także: złącze microUSB, gniazdo zasilające śrubowe, przycisk RESET i BOOT oraz wyprowadzenia służące do podłączenia silników oraz czujnikó z serii Gravity.
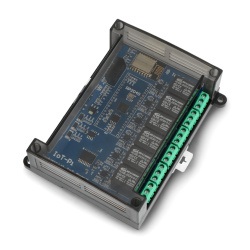
Romeo BLE Quad - Bluetooth 4.0 + sterownik silników DRV8833.

Moduł pracuje z napięciem 3,3 V. W celu połączenia z układami 5 V sygnały należy podłączyć poprzez konwerter napięć. Urządzenie posiada wiele dodatkowych cech, których brakuje tradycyjnym płytkom Arduino:
Firma DFRobot wprowadziła kolorowe złącza, które ułatwiają identyfikację wyprowadzeń:
|
W celu uruchomienia modułu, należy połączyć układ z komputerem za pomocą przewodu microUSB oraz postępować zgodnie z przewodnikiem użytkownika. |
Moduł można zasilać poprzez przewód USB oraz urządzenie zewnętrzne, np. zasilacz sieciowy. Przełączanie źródła zasilania odbywa się w sposób automatyczny. Zasilacz podłączany jest do złącz pinowych. Można również zasilić moduł przez złącze microUSB.
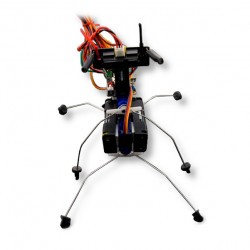
Romeo BLE Quad - Bluetooth 4.0 + sterownik silników DRV8833 to niewielki, ale doskonale wyposażony moduł główny zgodny ze środowiskiem Arduino. Pozwala na budowę zdalnie sterowanego pojazdu, autonomicznego robota mobilnego, a także różnorodnych projektów „okołorobotycznych”.
Sercem płytki jest 32-bitowy mikrokontroler STM32F103RET6 z rdzeniem ARM Cortex-M3, taktowany częstotliwością 72 MHz. Na pokładzie znalazł się także scalony transceiver Bluetooth 4.0 marki Texas Instruments – CC2540 o zasięgu do 30 metrów.
Podwójny sterownik silników DRV8833 znajdujący się na płytce Romeo BLE Quad pozwala na jednoczesne sterowanie nawet czterema napędami typu DC, co umożliwia budowę robota terenowego z napędem 4WD albo prostego ramienia robotycznego.
Cztery dodatkowe złącza służą do podłączenia enkoderów inkrementalnych, po jednym dla każdego z silników. Takie rozwiązanie pozwala na dokładne pozycjonowanie, a także wiarygodną kontrolę prędkości obrotowej w pętli sprzężenia zwrotnego.
| Napięcie zasil. od | 5.0 V |
| Napięcie zasil. do | 5.0 V |
| Napięcie wyjścia od | 3.3 V |
| Napięcie wyjścia do | 3.3 V |
| Napięcie wyjściowe nominalne | 3.3 V |
| UC - Mikrokontroler | STM32F103RET6 |
| UC - Rdzeń | 32-bit ARM Cortex |
| UC - Pamięć Flash | 512 kB |
| UC - Pamięć RAM | 64 kB |
| UC - Ilość rdzeni | 1. Single Core |
| UC - Piny cyfrowe | 10 |
| UC - wejścia analog. | 5 |
| UC - Taktowanie | 72 MHz |
| UC - Przetwornik AC | 12-bitów |
| UC - Interfejs USB | microUSB |
| UC - Bluetooth | Tak |
| UC - Interfejs I2C | Tak |
| UC - Interfejs UART | Tak |
| UC - Interfejs SPI | tak |
| Szerokość opakowania | 9 cm |
| Wysokość opakowania | 3 cm |
| Głębokość opakowania | 11 cm |
| Masa opakowania | 0.06 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

















