





















































































































































































































































































- EOL
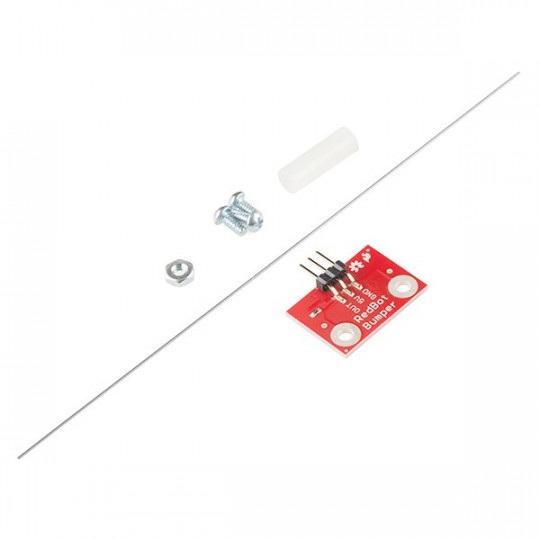








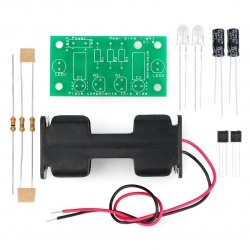
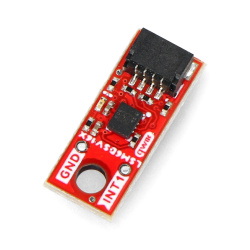
Mechaniczny czujnik krańcowy montowany jako zderzak umożliwia wykrycie przeszkody znajdującej się przed robotem.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
Mechaniczny czujnik krańcowy montowany jako zderzak robota umożliwia detekcję znajdującej się przed robotem przeszkody. Kiedy wąsy wykryją zaporę, czujnik dostarczy informację w postaci sygnału cyfrowego do mikrokontrolera sterującego. W zależności od pomysłu użytkownika robot może np. zatrzymać silniki lub ominąć przeszkodę.
| Produkt kompatybilny z Arduino
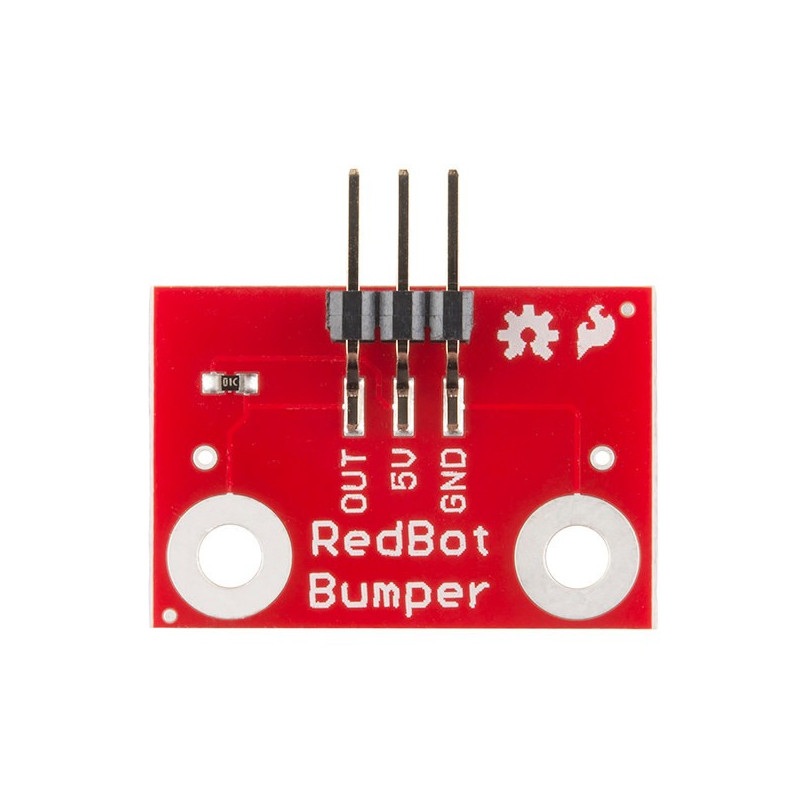
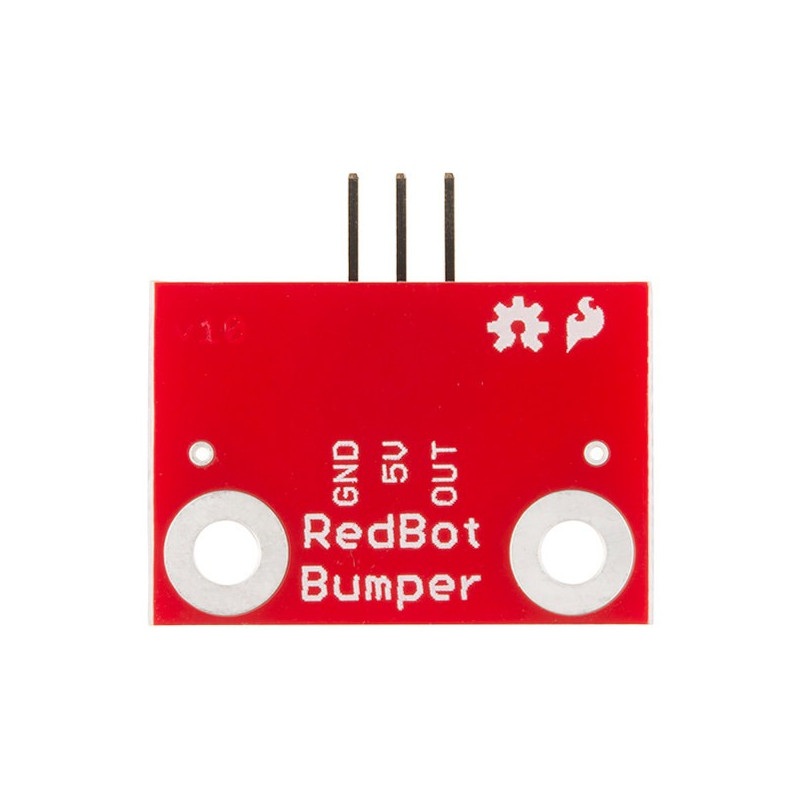
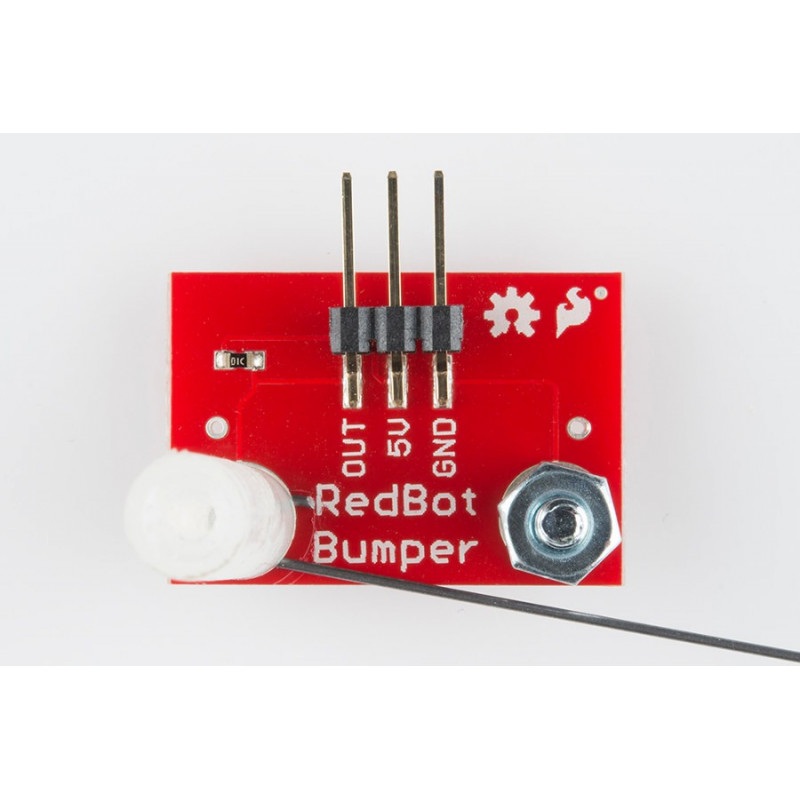
Urządzenie posiada złącze 3-pinowe goldpin (raster 2,54 mm). Szczegóły podłączenia można znaleźć w instrukcji przygotowanej przez firmę SparkFun. Przykładowy program dostępny jest w bibliotece RedBot dla Arduino. |
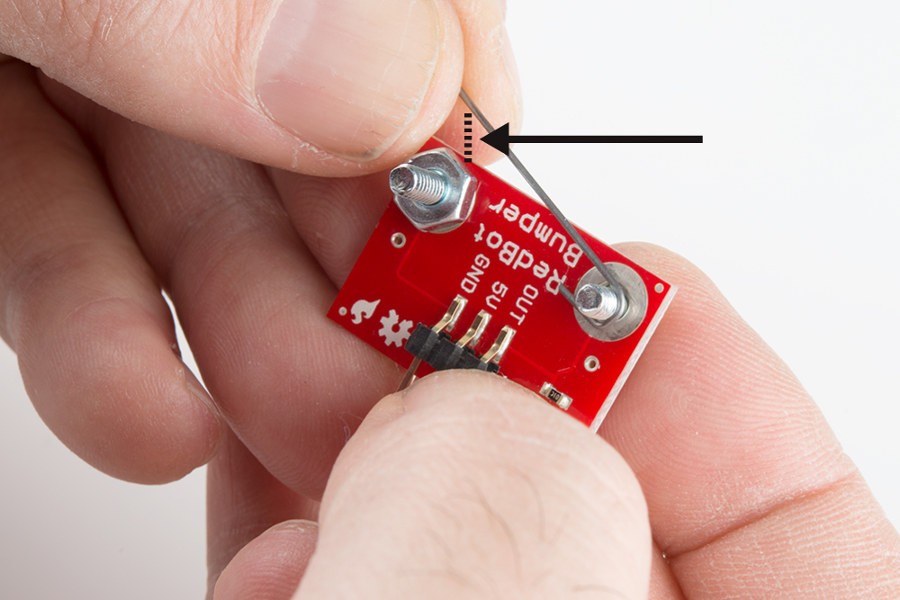

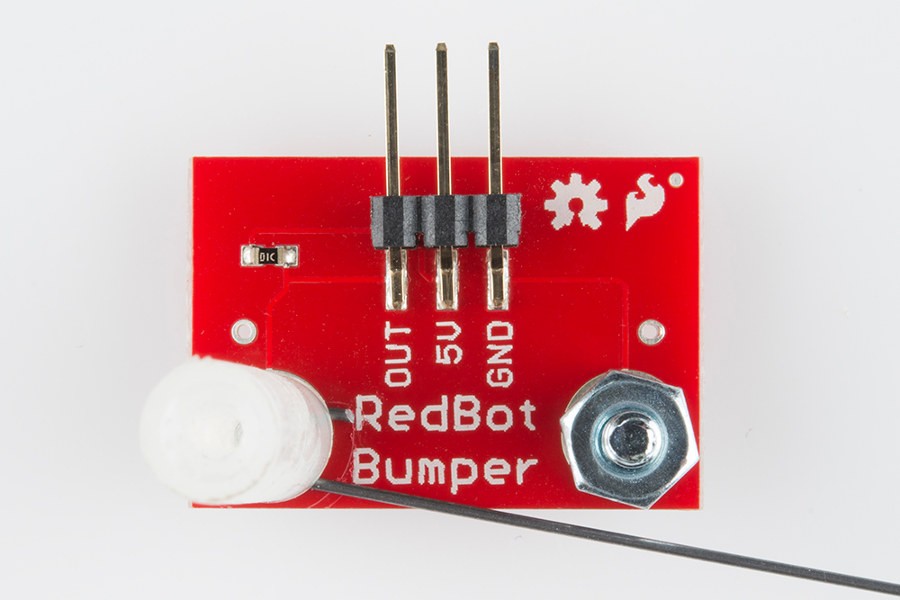
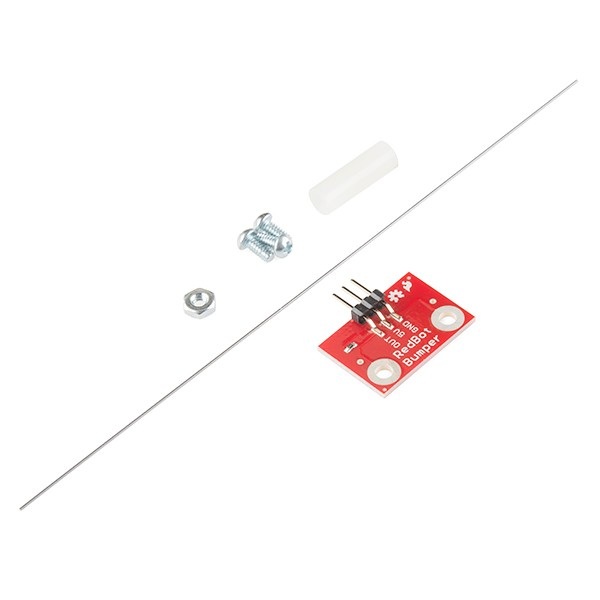
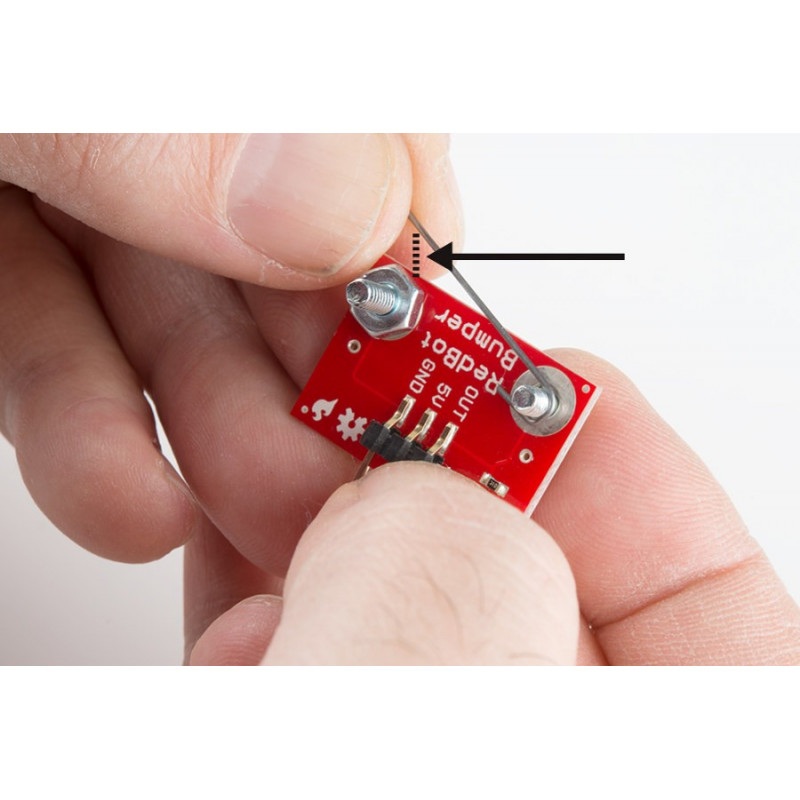
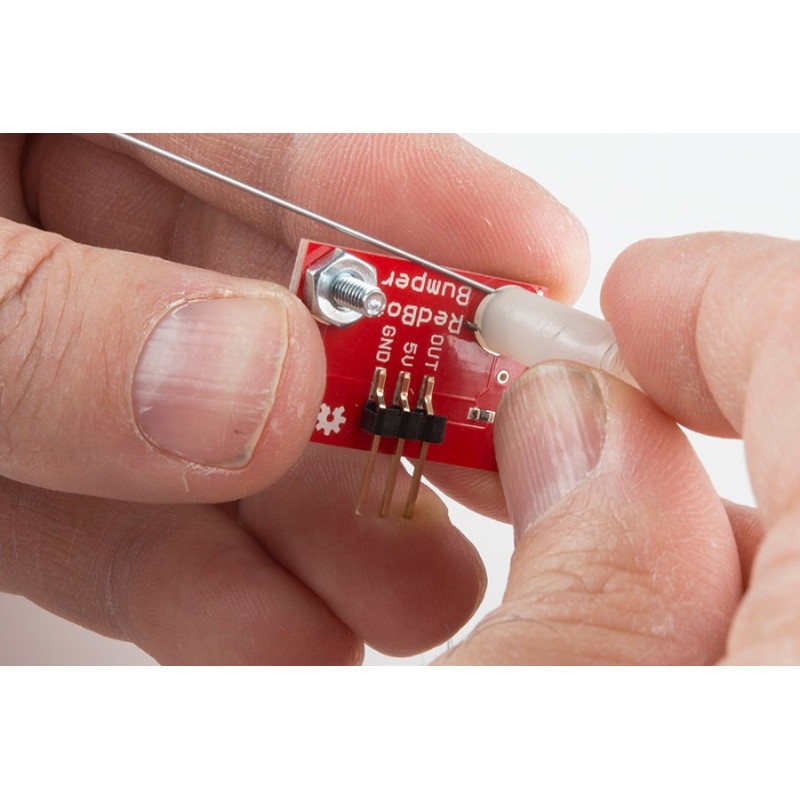
Zestaw składa się z jednej płytki, do której należy odpowiednio przymocować drucik. Wyjście czujnika zmieni stan logiczny, gdy zamontowany drucik połączy się z śrubką (tak jak pokazano na zdjęciach w tym artykule).
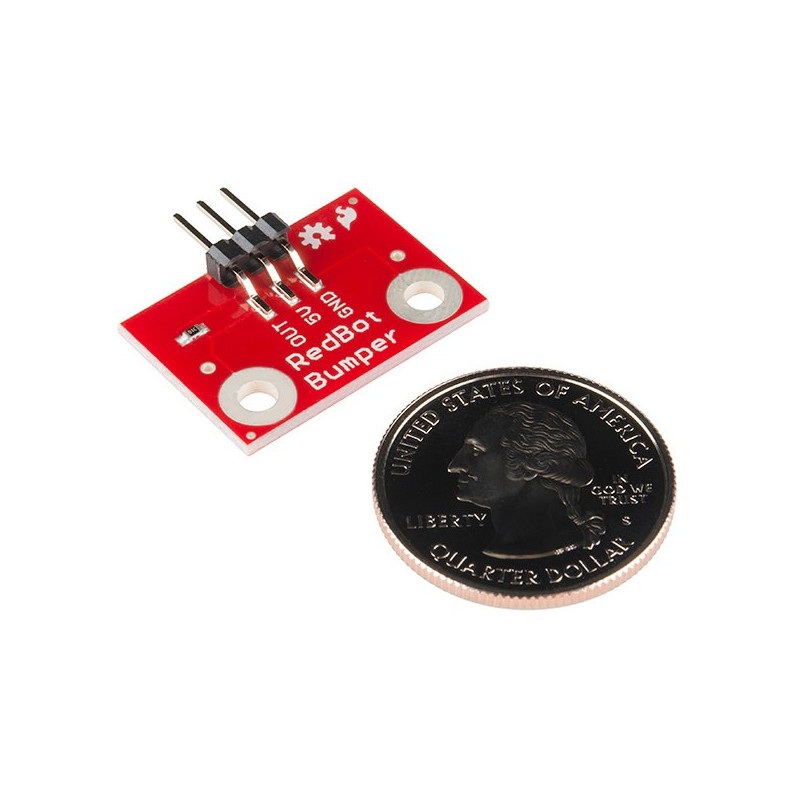
Wymiary czujnika to: 26,27 x 17,67 mm
W naszej ofercie również zestaw do budowa robota RedBot Kit.
| Szerokość opakowania | 10 cm |
| Wysokość opakowania | 0.525 cm |
| Głębokość opakowania | 18 cm |
| Masa opakowania | 0.007 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!